
2024 |
|
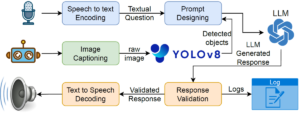
 | PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Conference The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024, 2024. Abstract | Links | BibTeX | Tags: assistive devices, human-robot interaction, human-robot interface @conference{Latif2024bb, title = {PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations}, author = {Ehsan Latif and Ramviyas Parasuraman and Xiaoming Zhai}, doi = {10.1109/RO-MAN60168.2024.10731312}, year = {2024}, date = {2024-08-30}, booktitle = {The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024}, abstract = { Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. }, keywords = {assistive devices, human-robot interaction, human-robot interface}, pubstate = {published}, tppubtype = {conference} } Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. |
 | PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Workshop IEEE ICRA 2024 Workshop on Accelerating Discovery in Natural Science Laboratories with AI and Robotics, 2024, (Selected for the Pioneer Award). Abstract | Links | BibTeX | Tags: assistive devices, autonomy, human-robot interaction, human-robot interface, learning @workshop{Latif2024d, title = {PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations}, author = {Ehsan Latif, Ramviyas Parasuraman, and Xiaoming Zhai}, url = {https://sites.google.com/view/icra24-accelerating-discovery}, year = {2024}, date = {2024-05-13}, booktitle = {IEEE ICRA 2024 Workshop on Accelerating Discovery in Natural Science Laboratories with AI and Robotics}, abstract = {Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. }, note = {Selected for the Pioneer Award}, keywords = {assistive devices, autonomy, human-robot interaction, human-robot interface, learning}, pubstate = {published}, tppubtype = {workshop} } Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. |
2019 |
|
 | Soft-packaged sensory glove system for human-like natural interaction and control of prosthetic hands Journal Article NPG Asia Materials , 11 (43), 2019, (Nature Publishing Group). Abstract | Links | BibTeX | Tags: assistive devices, prosthetic @article{Kim2019, title = {Soft-packaged sensory glove system for human-like natural interaction and control of prosthetic hands}, author = {Min Ku Kim and Ramviyas Parasuraman and Liu Wang and Yeonsoo Park and Bongjoong Kim and Seung Jun Lee and Nanshu Lu and Byung-Cheol Min and Chi Hwan Lee}, url = {https://www.nature.com/articles/s41427-019-0143-9}, doi = {10.1038/s41427-019-0143-9}, year = {2019}, date = {2019-11-01}, journal = {NPG Asia Materials }, volume = {11}, number = {43}, abstract = {Hand amputees experience with strenuous daily life challenges, often leading them to use a life-long prosthetic hand(s) and services. Modern advanced prosthetic hands demand capability to provide human hand-like sensory perceptions to receive external stimuli during daily activities while simultaneously replicating realistic appearance and physical properties to help them integrate into social contexts naturally, yet its practical realization is impeded by a lack of effective methodologies. Here, we present an optimal set of materials, design layouts and fabrication scheme to construct easy-to-wear seamless electronic glove (e-glove) suitable for arbitrary hand shapes, which provides all of the desired human hand-like features. The system configuration involves connecting to a control wristwatch unit for real-time display of measured sensory data and remote transmission to the user. Experimental and computational studies provide details into the underlying principles of materials selection, mechanics design, and operational management of the entire system. Demonstration of the e-glove system in interactions with human subjects illustrates the utility, comfort and convenience.}, note = {Nature Publishing Group}, keywords = {assistive devices, prosthetic}, pubstate = {published}, tppubtype = {article} } Hand amputees experience with strenuous daily life challenges, often leading them to use a life-long prosthetic hand(s) and services. Modern advanced prosthetic hands demand capability to provide human hand-like sensory perceptions to receive external stimuli during daily activities while simultaneously replicating realistic appearance and physical properties to help them integrate into social contexts naturally, yet its practical realization is impeded by a lack of effective methodologies. Here, we present an optimal set of materials, design layouts and fabrication scheme to construct easy-to-wear seamless electronic glove (e-glove) suitable for arbitrary hand shapes, which provides all of the desired human hand-like features. The system configuration involves connecting to a control wristwatch unit for real-time display of measured sensory data and remote transmission to the user. Experimental and computational studies provide details into the underlying principles of materials selection, mechanics design, and operational management of the entire system. Demonstration of the e-glove system in interactions with human subjects illustrates the utility, comfort and convenience. |
2018 |
|
 | Special Issue on “Assistive Robotics” Journal Article 2018. Abstract | Links | BibTeX | Tags: assistive devices, robotics @article{Parasuraman2018c, title = {Special Issue on “Assistive Robotics”}, author = {Ramviyas Parasuraman and Byung-Cheol Min}, url = {https://www.mdpi.com/2227-7080/6/4/95}, doi = {10.3390/technologies6040095}, year = {2018}, date = {2018-10-20}, abstract = {The technology behind robotics has rapidly advanced to a level enabling humans and robots to interact in everyday aspects of life. Nevertheless, it remains a challenge to design and develop these interactions to accommodate people of varying abilities [1]. Assistive Robotics is a branch of robotics that addresses the research challenges inherent in providing sensory and perception abilities and performing actions that are beneficial to the elderly and physically-challenged people [2,3]. This Special Issue presents recent research advances in the field of Assistive Robotics that can empower people to perform various tasks they could not otherwise, to be more independent, and to improve their overall quality of life. Robots for the visually impaired, telepresence robots for physical impairments, social robots for cognitive impairments, and wearable robots are some of the areas of research that were welcomed in this special issue.}, keywords = {assistive devices, robotics}, pubstate = {published}, tppubtype = {article} } The technology behind robotics has rapidly advanced to a level enabling humans and robots to interact in everyday aspects of life. Nevertheless, it remains a challenge to design and develop these interactions to accommodate people of varying abilities [1]. Assistive Robotics is a branch of robotics that addresses the research challenges inherent in providing sensory and perception abilities and performing actions that are beneficial to the elderly and physically-challenged people [2,3]. This Special Issue presents recent research advances in the field of Assistive Robotics that can empower people to perform various tasks they could not otherwise, to be more independent, and to improve their overall quality of life. Robots for the visually impaired, telepresence robots for physical impairments, social robots for cognitive impairments, and wearable robots are some of the areas of research that were welcomed in this special issue. |
Publications
2024 |
|
| PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Conference The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024, 2024. |
| PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Workshop IEEE ICRA 2024 Workshop on Accelerating Discovery in Natural Science Laboratories with AI and Robotics, 2024, (Selected for the Pioneer Award). |
2019 |
|
| Soft-packaged sensory glove system for human-like natural interaction and control of prosthetic hands Journal Article NPG Asia Materials , 11 (43), 2019, (Nature Publishing Group). |
2018 |
|
| Special Issue on “Assistive Robotics” Journal Article 2018. |