
2025 |
|
 | Edge Computing and its Application in Robotics: A Survey Journal Article Journal of Sensor and Actuator Networks, 14 (4), 2025. Abstract | Links | BibTeX | Tags: computing, learning, multi-robot systems, networking @article{Tahir2025, title = {Edge Computing and its Application in Robotics: A Survey}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/2224-2708/14/4/65}, doi = {10.3390/jsan14040065}, year = {2025}, date = {2025-06-23}, journal = {Journal of Sensor and Actuator Networks}, volume = {14}, number = {4}, abstract = {The edge computing paradigm has gained prominence in both academic and industry circles in recent years. When edge computing facilities and services are implemented in robotics, they become a key enabler in the deployment of artificial intelligence applications to robots. Time-sensitive robotics applications benefit from the reduced latency, mobility, and location awareness provided by the edge computing paradigm, which enables real-time data processing and intelligence at the network’s edge. While the advantages of integrating edge computing into robotics are numerous, there has been no recent survey that comprehensively examines these benefits. This paper aims to bridge that gap by highlighting important work in the domain of edge robotics, examining recent advancements, and offering deeper insight into the challenges and motivations behind both current and emerging solutions. In particular, this article provides a comprehensive evaluation of recent developments in edge robotics, with an emphasis on fundamental applications, providing in-depth analysis of the key motivations, challenges, and future directions in this rapidly evolving domain. It also explores the importance of edge computing in real-world robotics scenarios where rapid response times are critical. Finally, the paper outlines various open research challenges in the field of edge robotics. }, keywords = {computing, learning, multi-robot systems, networking}, pubstate = {published}, tppubtype = {article} } The edge computing paradigm has gained prominence in both academic and industry circles in recent years. When edge computing facilities and services are implemented in robotics, they become a key enabler in the deployment of artificial intelligence applications to robots. Time-sensitive robotics applications benefit from the reduced latency, mobility, and location awareness provided by the edge computing paradigm, which enables real-time data processing and intelligence at the network’s edge. While the advantages of integrating edge computing into robotics are numerous, there has been no recent survey that comprehensively examines these benefits. This paper aims to bridge that gap by highlighting important work in the domain of edge robotics, examining recent advancements, and offering deeper insight into the challenges and motivations behind both current and emerging solutions. In particular, this article provides a comprehensive evaluation of recent developments in edge robotics, with an emphasis on fundamental applications, providing in-depth analysis of the key motivations, challenges, and future directions in this rapidly evolving domain. It also explores the importance of edge computing in real-world robotics scenarios where rapid response times are critical. Finally, the paper outlines various open research challenges in the field of edge robotics. |
2024 |
|
 | Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. Abstract | Links | BibTeX | Tags: computing, multi-robot systems, networking @conference{Tahir2024, title = {Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles}, author = {Nazish Tahir, Ramviyas Parasuraman, Haijian Sun}, url = {https://ieeexplore.ieee.org/abstract/document/10757784}, doi = {10.1109/VTC2024-Fall63153.2024.10757784}, year = {2024}, date = {2024-10-10}, booktitle = {2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall)}, pages = {2577-2465}, abstract = {Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. }, keywords = {computing, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. |
2023 |
|
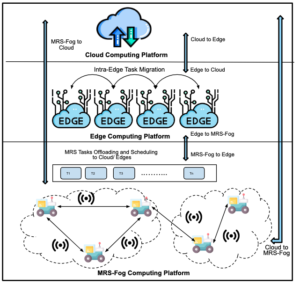
 | Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023c, title = {Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473568}, doi = {10.1109/IRC59093.2023.00060}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency. |
 | Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023b, title = {Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473544}, doi = {10.1109/IRC59093.2023.00059}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems. |
Publications
2025 |
|
| Edge Computing and its Application in Robotics: A Survey Journal Article Journal of Sensor and Actuator Networks, 14 (4), 2025. |
2024 |
|
| Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. |
2023 |
|
| Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |