
2026 |
|
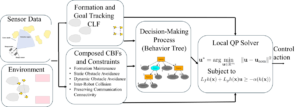 | Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, multi-robot @conference{Tasooji2026b, title = {Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles}, author = {Tohid Kargar Tasooji and Ramviyas Parasuraman}, url = {https://herolab.org/tasooji_iros_2026_cbf_qp/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {This paper introduces a decentralized control framework for safe and adaptive multi-robot formation in dynamic and uncertain environments. The proposed approach formulates a generalized quadratic program (QP) that integrates multiple Control Barrier Functions (CBFs) for safety, connectivity preservation, and obstacle avoidance with a Control Lyapunov Function (CLF) for goal convergence. To resolve inherent conflicts among these objectives, we present the first integration of behavior trees with CBF–CLF–QP control, providing a structured and modular mechanism for prioritized switching across safety, connectivity, formation, and goal-reaching tasks without deadlock. The proposed framework is fully decentralized, computationally efficient, and scalable, with each agent solving a local QP in sub-second cycles, making it practical for real-time, on-board implementation. Extensive simulations and experiments in cluttered, dynamic environments with moving obstacles and uncertain obstacle geometries demonstrate the method’s ability to ensure safety, maintain network connectivity, and achieve resilient formation control while adapting to rapidly changing conditions. }, keywords = {control, multi-robot}, pubstate = {forthcoming}, tppubtype = {conference} } This paper introduces a decentralized control framework for safe and adaptive multi-robot formation in dynamic and uncertain environments. The proposed approach formulates a generalized quadratic program (QP) that integrates multiple Control Barrier Functions (CBFs) for safety, connectivity preservation, and obstacle avoidance with a Control Lyapunov Function (CLF) for goal convergence. To resolve inherent conflicts among these objectives, we present the first integration of behavior trees with CBF–CLF–QP control, providing a structured and modular mechanism for prioritized switching across safety, connectivity, formation, and goal-reaching tasks without deadlock. The proposed framework is fully decentralized, computationally efficient, and scalable, with each agent solving a local QP in sub-second cycles, making it practical for real-time, on-board implementation. Extensive simulations and experiments in cluttered, dynamic environments with moving obstacles and uncertain obstacle geometries demonstrate the method’s ability to ensure safety, maintain network connectivity, and achieve resilient formation control while adapting to rapidly changing conditions. |
2025 |
|
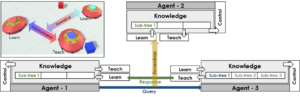 | IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. Abstract | Links | BibTeX | Tags: behavior-trees, cooperation, multi-robot @article{Venkata2025, title = {IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping}, author = {Sanjay Sarma Oruganti Venkata and Ramviyas Parasuraman and Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/document/10976677}, doi = {10.1109/TCYB.2025.3560564}, year = {2025}, date = {2025-04-25}, journal = {IEEE Transactions on Cybernetics}, abstract = {Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication.}, keywords = {behavior-trees, cooperation, multi-robot}, pubstate = {published}, tppubtype = {article} } Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication. |
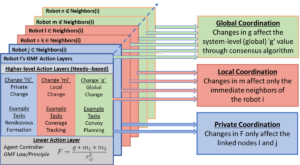 | 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Starks2025, title = {GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems}, author = {Michael Starks and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11128543/}, doi = {10.1109/ICRA55743.2025.11128543}, year = {2025}, date = {2025-05-23}, booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)}, abstract = {Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws.}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws. |
2024 |
|
 | Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. Abstract | Links | BibTeX | Tags: cooperation, learning, mapping, multi-robot, networking @article{Latif2024b, title = {Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10413563}, doi = {10.1109/LRA.2024.3358095}, year = {2024}, date = {2024-03-01}, journal = {IEEE Robotics and Automation Letters}, volume = {9}, number = {3}, pages = {2622 - 2629}, abstract = {Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. }, keywords = {cooperation, learning, mapping, multi-robot, networking}, pubstate = {published}, tppubtype = {article} } Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Munir2024b, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir and Ayan Dutta and Ramviyas Parasuraman}, url = {https://link.springer.com/chapter/10.1007/978-3-032-04584-3_15}, doi = {10.1007/978-3-032-04584-3_15}, year = {2024}, date = {2024-10-31}, booktitle = {The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {In Press}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: localization, multi-robot, networking @conference{Latif2024c, title = {HGP-RL: Distributed Hierarchical Gaussian Processes for Wi-Fi-based Relative Localization in Multi-Robot Systems }, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802653}, doi = {10.1109/IROS58592.2024.10802653}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3387-3394}, abstract = {Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots.}, keywords = {localization, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots. |
 | Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot, planning @conference{Munir2024, title = {Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802222}, doi = {10.1109/IROS58592.2024.10802222}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3395-3402}, abstract = {Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. }, keywords = {cooperation, localization, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. |
 | Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). Abstract | Links | BibTeX | Tags: multi-robot, networking @conference{Zhang2024, title = {Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications}, author = {Lihao Zhang, Haijian Sun, Jin Sun, Ramviyas Parasuraman, Yinghui Ye, Rose Qingyang Hu}, url = {https://ieeexplore.ieee.org/document/10622509}, doi = {10.1109/ICC51166.2024.10622509}, year = {2024}, date = {2024-06-13}, booktitle = {2024 IEEE International Conference on Communications (ICC)}, abstract = {Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency.}, note = {Accepted for Presentation at ICC 2024}, keywords = {multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency. |
2023 |
|
 | Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot, planning @article{Munir2022b, title = {Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1424-8220/23/23/9600}, doi = {10.3390/s23239600}, year = {2023}, date = {2023-12-04}, journal = {Sensors}, volume = {23}, number = {23}, abstract = {Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable.}, keywords = {control, mapping, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable. |
 | KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. Abstract | Links | BibTeX | Tags: autonomy, behavior-trees, heterogeneity, multi-robot, planning @article{Venkata2023b, title = {KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems}, author = {Sanjay Sarma Oruganti Venkata, Ramviyas Parasuraman, Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/abstract/document/10183654}, doi = {10.1109/TRO.2023.3290449}, year = {2023}, date = {2023-07-13}, journal = {IEEE Transactions on Robotics}, volume = {30}, number = {5}, pages = {4114 - 4130}, abstract = {Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights.}, keywords = {autonomy, behavior-trees, heterogeneity, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights. |
 | Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023c, title = {Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473568}, doi = {10.1109/IRC59093.2023.00060}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency. |
 | Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023b, title = {Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473544}, doi = {10.1109/IRC59093.2023.00059}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems. |
 | SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. Abstract | Links | BibTeX | Tags: cooperation, localization, mapping, multi-robot @conference{Latif2023b, title = {SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10342157}, doi = {10.1109/IROS55552.2023.10342157}, year = {2023}, date = {2023-10-05}, booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)}, organization = {IEEE}, abstract = {The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications.}, keywords = {cooperation, localization, mapping, multi-robot}, pubstate = {published}, tppubtype = {conference} } The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications. |
 | Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. Abstract | Links | BibTeX | Tags: cooperation, mapping, multi-robot, multi-robot systems, networking @conference{Latif2023, title = {Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration}, author = {Ehsan Latif and WenZhan Song and Ramviyas Parasuraman}, doi = {10.1109/INFOCOMWKSHPS57453.2023.10226167}, year = {2023}, date = {2023-05-01}, booktitle = {IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS)}, abstract = {Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios.}, keywords = {cooperation, mapping, multi-robot, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios. |
 | HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. Abstract | Links | BibTeX | Tags: control, multi-robot, swarm-robotics @conference{Starks2023, title = {HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support}, author = {Michael Starks and Aryan Gupta and Sanjay Sarma O V and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10039174}, doi = {10.1109/SII55687.2023.10039174}, year = {2023}, date = {2023-01-23}, booktitle = {2023 IEEE/SICE International Symposium on System Integrations (SII 2023) }, publisher = {IEEE}, abstract = {Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations.}, keywords = {control, multi-robot, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). Abstract | Links | BibTeX | Tags: control, multi-robot, planning @workshop{Munir2023, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir, Ayan Dutta, and Ramviyas Parasuraman}, url = {https://sites.bu.edu/mrs2023/program/list-of-accepted-papers-and-presentations/}, year = {2023}, date = {2023-12-06}, booktitle = {IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {Presented as Poster Paper}, keywords = {control, multi-robot, planning}, pubstate = {published}, tppubtype = {workshop} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. Abstract | Links | BibTeX | Tags: cooperation, exploration, multi-robot @workshop{Latif2023d, title = {CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://sites.google.com/view/camrs-icra2023/contributed-papers}, year = {2023}, date = {2023-06-02}, booktitle = {ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning}, abstract = {Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication.}, keywords = {cooperation, exploration, multi-robot}, pubstate = {published}, tppubtype = {workshop} } Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication. |
2022 |
|
 | Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Gui2022, title = {Message Expiration-Based Distributed Multi-Robot Task Management}, author = {Yikang Gui and Ehsan Latif and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, abstract = {Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach. |
 | Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Latif2022, title = {Energy-Aware Multi-Robot Task Allocation in Persistent Tasks}, author = {Ehsan Latif and Yikang Gui and Aiman Munir and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, journal = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics}, abstract = {The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach. |
2021 |
|
 | 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. Abstract | Links | BibTeX | Tags: evaluation, multi-robot, planning, trust @conference{Yang2021, title = {How Can Robots Trust Each Other For Better Cooperation? A Relative Needs Entropy Based Robot-Robot Trust Assessment Model}, author = {Qin Yang and Ramviyas Parasuraman}, doi = {10.1109/SMC52423.2021.9659187}, year = {2021}, date = {2021-10-20}, booktitle = {2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC)}, pages = {2656--2663}, publisher = {IEEE}, organization = {IEEE}, abstract = {Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models.}, keywords = {evaluation, multi-robot, planning, trust}, pubstate = {published}, tppubtype = {conference} } Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models. |
2020 |
|
 | 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. Abstract | BibTeX | Tags: behavior-trees, heterogeneity, multi-robot @conference{Venkata2020, title = {Impact of Heterogeneity in Multi-Robot Systems on Collective Behaviors Studied Using a Search and Rescue Problem}, author = {Sanjay Sarma Oruganti Venkata, Ramviyas Parasuraman, Ramana Pidaparti}, year = {2020}, date = {2020-11-06}, booktitle = {2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020)}, abstract = {Many species in nature demonstrate symbiotic relationships leading to emergent behaviors through cooperation, which are sometimes beyond the scope of the partnerships within the same species. These symbiotic relationships are classified as mutualism, commensalism, and parasitism based on the benefit levels involved. While these partnerships are ubiquitous in nature, it is imperative to understand the benefits of collective behaviors in designing heterogeneous multi-robot systems (HMRS). In this paper, we investigate the impact of heterogeneity on the performance of HMRS applied to a search and rescue problem. The groups consisting of searchers and rescuers, varied in the individual robot behaviors with multiple degrees of functionality overlap and group compositions, demonstrating various levels of heterogeneity. We propose a new technique to measure heterogeneity in the agents through the use of Behavior Trees and use it to obtain heterogeneity informatics from our Monte Carlo simulations. The results show a positive correlation between the groups’ heterogeneity measure and the rescue efficiency demonstrating benefits in most of the scenarios. However, we also see cases where heterogeneity may hamper the group’s abilities pointing to the need for determining the optimal heterogeneity in group required to maximally benefit from HMRS in real-world applications.}, keywords = {behavior-trees, heterogeneity, multi-robot}, pubstate = {published}, tppubtype = {conference} } Many species in nature demonstrate symbiotic relationships leading to emergent behaviors through cooperation, which are sometimes beyond the scope of the partnerships within the same species. These symbiotic relationships are classified as mutualism, commensalism, and parasitism based on the benefit levels involved. While these partnerships are ubiquitous in nature, it is imperative to understand the benefits of collective behaviors in designing heterogeneous multi-robot systems (HMRS). In this paper, we investigate the impact of heterogeneity on the performance of HMRS applied to a search and rescue problem. The groups consisting of searchers and rescuers, varied in the individual robot behaviors with multiple degrees of functionality overlap and group compositions, demonstrating various levels of heterogeneity. We propose a new technique to measure heterogeneity in the agents through the use of Behavior Trees and use it to obtain heterogeneity informatics from our Monte Carlo simulations. The results show a positive correlation between the groups’ heterogeneity measure and the rescue efficiency demonstrating benefits in most of the scenarios. However, we also see cases where heterogeneity may hamper the group’s abilities pointing to the need for determining the optimal heterogeneity in group required to maximally benefit from HMRS in real-world applications. |
2019 |
|
 | Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks Journal Article Robotics and Autonomous Systems, 111 , pp. 73-87, 2019. Abstract | Links | BibTeX | Tags: multi-robot, networking, robotics @article{Tardioli2018, title = {Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks}, author = {Danilo Tardioli and Ramviyas Parasuraman and Petter Ögren. }, url = {https://www.sciencedirect.com/science/article/pii/S0921889017309144}, doi = {10.1016/j.robot.2018.10.009}, year = {2019}, date = {2019-01-01}, journal = {Robotics and Autonomous Systems}, volume = {111}, pages = {73-87}, abstract = {The Robot Operating System (ROS) is a popular and widely used software framework for building robotics systems. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes presents several issues regarding limited-bandwidth, delays, and jitter, when used in wireless multi-hop networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance by reducing delay and jitter in data exchanges, especially in multi-hop networks. Pound allows the use of multiple ROS masters (roscores), features data compression, and importantly, introduces a priority scheme that allows favoring more important flows over less important ones. We compare Pound to the state-of-the-art solutions through extensive experiments and show that it performs equally well, or better in all the test cases, including a control-over-network example.}, keywords = {multi-robot, networking, robotics}, pubstate = {published}, tppubtype = {article} } The Robot Operating System (ROS) is a popular and widely used software framework for building robotics systems. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes presents several issues regarding limited-bandwidth, delays, and jitter, when used in wireless multi-hop networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance by reducing delay and jitter in data exchanges, especially in multi-hop networks. Pound allows the use of multiple ROS masters (roscores), features data compression, and importantly, introduces a priority scheme that allows favoring more important flows over less important ones. We compare Pound to the state-of-the-art solutions through extensive experiments and show that it performs equally well, or better in all the test cases, including a control-over-network example. |
2018 |
|
 | Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. Abstract | Links | BibTeX | Tags: control, multi-robot, networking, robotics @conference{Parasuraman2018, title = {Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals}, author = {Ramviyas Parasuraman and Byung-Cheol Min.}, url = {https://www.youtube.com/watch?v=6BkFrJ8vceg&feature=youtu.be}, year = {2018}, date = {2018-10-15}, abstract = {In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers.}, keywords = {control, multi-robot, networking, robotics}, pubstate = {published}, tppubtype = {conference} } In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers. |
Publications
2026 |
|
| Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
2025 |
|
| IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. |
| 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. |
2024 |
|
| Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). |
| 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). |
2023 |
|
| Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. |
| KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. |
| Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. |
| Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. |
| HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). |
| CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. |
2022 |
|
| Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
2021 |
|
| 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. |
2020 |
|
| 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. |
2019 |
|
| Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks Journal Article Robotics and Autonomous Systems, 111 , pp. 73-87, 2019. |
2018 |
|
| Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. |