
2026 |
|
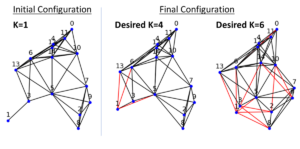 | Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, networking @conference{Sagale2026b, title = {Distributed Connectivity Restoration and Improvement in Networked Robots}, author = {Atharva Sagale and Ramviyas Parasuraman}, url = {https://herolab.org/iros26_sagale_dfcr/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. }, keywords = {control, cooperation, multi-robot systems, networking}, pubstate = {forthcoming}, tppubtype = {conference} } Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. |
 | DCL-Sparse: Distributed Relative Localization in Sparse Graphs Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: localization, multi-robot systems, networking @conference{Sagale2026, title = {DCL-Sparse: Distributed Relative Localization in Sparse Graphs}, author = {Atharva Sagale and Tohid Kargar Tasooji and Ramviyas Parasuraman}, url = {https://arxiv.org/abs/2412.14793}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {This paper presents a novel approach to range-based cooperative localization for robot swarms in GPS-denied environments, addressing the limitations of current methods in noisy and sparse settings. We propose a robust multi-layered localization framework that combines shadow edge localization techniques with the strategic deployment of UAVs. This approach not only addresses the challenges associated with nonrigid and poorly connected graphs but also enhances the convergence rate of the localization process. We introduce two key concepts: the S1-Edge approach in our distributed protocol to address the rigidity problem of sparse graphs and the concept of a powerful UAV node to increase the sensing and localization capability of the multi-robot system. Our approach leverages the advantages of the distributed localization methods, enhancing scalability and adaptability in large robot networks. We establish theoretical conditions for the new S1-Edge that ensure solutions exist even in the presence of noise, thereby validating the effectiveness of shadow edge localization. Extensive simulation experiments confirm the superior performance of our method compared to state-of-the-art techniques, resulting in up to 95% reduction in localization error, demonstrating substantial improvements in localization accuracy and robustness to sparse graphs. This work provides a decisive advancement in the field of multi-robot localization, offering a powerful tool for high-performance and reliable operations in challenging environments. }, keywords = {localization, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } This paper presents a novel approach to range-based cooperative localization for robot swarms in GPS-denied environments, addressing the limitations of current methods in noisy and sparse settings. We propose a robust multi-layered localization framework that combines shadow edge localization techniques with the strategic deployment of UAVs. This approach not only addresses the challenges associated with nonrigid and poorly connected graphs but also enhances the convergence rate of the localization process. We introduce two key concepts: the S1-Edge approach in our distributed protocol to address the rigidity problem of sparse graphs and the concept of a powerful UAV node to increase the sensing and localization capability of the multi-robot system. Our approach leverages the advantages of the distributed localization methods, enhancing scalability and adaptability in large robot networks. We establish theoretical conditions for the new S1-Edge that ensure solutions exist even in the presence of noise, thereby validating the effectiveness of shadow edge localization. Extensive simulation experiments confirm the superior performance of our method compared to state-of-the-art techniques, resulting in up to 95% reduction in localization error, demonstrating substantial improvements in localization accuracy and robustness to sparse graphs. This work provides a decisive advancement in the field of multi-robot localization, offering a powerful tool for high-performance and reliable operations in challenging environments. |
2025 |
|
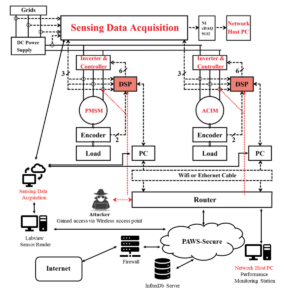 | Real-World Cyber Security Demonstration for Networked Electric Drives Journal Article IEEE Journal of Emerging and Selected Topics in Power Electronics, 13 (4), 2025. Abstract | Links | BibTeX | Tags: control, networking, trust @article{Yang2025, title = {Real-World Cyber Security Demonstration for Networked Electric Drives}, author = {He Yang and Bowen Yang and Stephen Coshatt and Qi Li and Kun Hu and Bryan Cooper Hammond and Jin Ye and Ramviyas Parasuraman and Wenzhan Song}, url = {https://ieeexplore.ieee.org/document/10924153}, year = {2025}, date = {2025-08-01}, journal = {IEEE Journal of Emerging and Selected Topics in Power Electronics}, volume = {13}, number = {4}, abstract = {In this article, we present the design and implementation of a cyber-physical security testbed for networked electric drive systems, aimed at conducting real-world security demonstrations. To our knowledge, this is one of the first security testbeds for networked electric drives, seamlessly integrating the domains of power electronics and computer science, and cybersecurity. By doing so, the testbed offers a comprehensive platform to explore and understand the intricate and often complex interactions between cyber and physical systems. The core of our testbed consists of four electric machine drives, meticulously configured to emulate small-scale but realistic information technology (IT) and operational technology (OT) networks. This setup both provides a controlled environment for simulating a wide array of cyber-attacks, and mirrors potential real-world attack scenarios with a high degree of fidelity. The testbed serves as an invaluable resource for the study of cyber-physical security, offering a practical and dynamic platform for testing and validating cybersecurity measures in the context of networked electric drive systems. As a concrete example of the testbed’s capabilities, we have developed and implemented a Python-based script designed to execute step-stone attacks over a wireless local area network (WLAN). This script leverages a sequence of target IP addresses, simulating a real-world attack vector that could be exploited by adversaries. To counteract such threats, we demonstrate the efficacy of our developed cyber-attack detection algorithms, which are integral to our testbed’s security framework. Furthermore, the testbed incorporates a real-time visualization system using InfluxDB and Grafana, providing a dynamic and interactive representation of networked electric drives and their associated security monitoring mechanisms. This visualization component not only enhances the testbed’s usability but also offers insightful, real-time data for researchers and practitioners, thereby facilitating a deeper understanding of cyber-physical security dynamics in networked electric drive systems.}, keywords = {control, networking, trust}, pubstate = {published}, tppubtype = {article} } In this article, we present the design and implementation of a cyber-physical security testbed for networked electric drive systems, aimed at conducting real-world security demonstrations. To our knowledge, this is one of the first security testbeds for networked electric drives, seamlessly integrating the domains of power electronics and computer science, and cybersecurity. By doing so, the testbed offers a comprehensive platform to explore and understand the intricate and often complex interactions between cyber and physical systems. The core of our testbed consists of four electric machine drives, meticulously configured to emulate small-scale but realistic information technology (IT) and operational technology (OT) networks. This setup both provides a controlled environment for simulating a wide array of cyber-attacks, and mirrors potential real-world attack scenarios with a high degree of fidelity. The testbed serves as an invaluable resource for the study of cyber-physical security, offering a practical and dynamic platform for testing and validating cybersecurity measures in the context of networked electric drive systems. As a concrete example of the testbed’s capabilities, we have developed and implemented a Python-based script designed to execute step-stone attacks over a wireless local area network (WLAN). This script leverages a sequence of target IP addresses, simulating a real-world attack vector that could be exploited by adversaries. To counteract such threats, we demonstrate the efficacy of our developed cyber-attack detection algorithms, which are integral to our testbed’s security framework. Furthermore, the testbed incorporates a real-time visualization system using InfluxDB and Grafana, providing a dynamic and interactive representation of networked electric drives and their associated security monitoring mechanisms. This visualization component not only enhances the testbed’s usability but also offers insightful, real-time data for researchers and practitioners, thereby facilitating a deeper understanding of cyber-physical security dynamics in networked electric drive systems. |
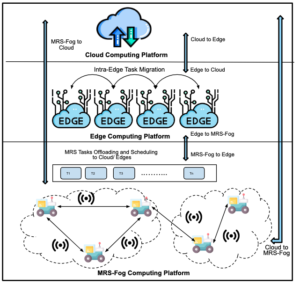 | Edge Computing and its Application in Robotics: A Survey Journal Article Journal of Sensor and Actuator Networks, 14 (4), 2025. Abstract | Links | BibTeX | Tags: computing, learning, multi-robot systems, networking @article{Tahir2025, title = {Edge Computing and its Application in Robotics: A Survey}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/2224-2708/14/4/65}, doi = {10.3390/jsan14040065}, year = {2025}, date = {2025-06-23}, journal = {Journal of Sensor and Actuator Networks}, volume = {14}, number = {4}, abstract = {The edge computing paradigm has gained prominence in both academic and industry circles in recent years. When edge computing facilities and services are implemented in robotics, they become a key enabler in the deployment of artificial intelligence applications to robots. Time-sensitive robotics applications benefit from the reduced latency, mobility, and location awareness provided by the edge computing paradigm, which enables real-time data processing and intelligence at the network’s edge. While the advantages of integrating edge computing into robotics are numerous, there has been no recent survey that comprehensively examines these benefits. This paper aims to bridge that gap by highlighting important work in the domain of edge robotics, examining recent advancements, and offering deeper insight into the challenges and motivations behind both current and emerging solutions. In particular, this article provides a comprehensive evaluation of recent developments in edge robotics, with an emphasis on fundamental applications, providing in-depth analysis of the key motivations, challenges, and future directions in this rapidly evolving domain. It also explores the importance of edge computing in real-world robotics scenarios where rapid response times are critical. Finally, the paper outlines various open research challenges in the field of edge robotics. }, keywords = {computing, learning, multi-robot systems, networking}, pubstate = {published}, tppubtype = {article} } The edge computing paradigm has gained prominence in both academic and industry circles in recent years. When edge computing facilities and services are implemented in robotics, they become a key enabler in the deployment of artificial intelligence applications to robots. Time-sensitive robotics applications benefit from the reduced latency, mobility, and location awareness provided by the edge computing paradigm, which enables real-time data processing and intelligence at the network’s edge. While the advantages of integrating edge computing into robotics are numerous, there has been no recent survey that comprehensively examines these benefits. This paper aims to bridge that gap by highlighting important work in the domain of edge robotics, examining recent advancements, and offering deeper insight into the challenges and motivations behind both current and emerging solutions. In particular, this article provides a comprehensive evaluation of recent developments in edge robotics, with an emphasis on fundamental applications, providing in-depth analysis of the key motivations, challenges, and future directions in this rapidly evolving domain. It also explores the importance of edge computing in real-world robotics scenarios where rapid response times are critical. Finally, the paper outlines various open research challenges in the field of edge robotics. |
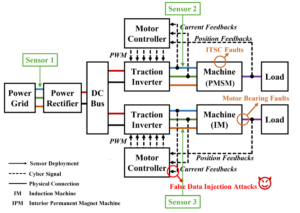 | Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. Abstract | Links | BibTeX | Tags: control, networking @article{Wu2024, title = {Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation}, author = {Wu, Shushan and Yang, Bowen and Yang, He and Coshatt, Stephen J. and Gong, Xilin and Parasuraman, Ramviyas Nattanmai and Conrad, Justin and Perdisci, Roberto and Zhong, Wenxuan and Ye, Jin and Ma, Ping and Song, WenZhan}, url = {https://ieeexplore.ieee.org/abstract/document/10769069}, doi = {10.1109/JIOT.2024.3476268}, year = {2025}, date = {2025-03-15}, journal = {IEEE Internet of Things Journal}, volume = {12}, number = {6}, pages = {6457-646}, abstract = {The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. }, keywords = {control, networking}, pubstate = {published}, tppubtype = {article} } The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. |
 | Anonymous Distributed Localisation via Spatial Population Protocols Conference International Symposium on Algorithms and Computation (ISAAC 2025)., 2025. Links | BibTeX | Tags: localization, multi-robot systems, networking @conference{Gąsieniec2025b, title = {Anonymous Distributed Localisation via Spatial Population Protocols}, author = {Leszek Gąsieniec, Łukasz Kuszner, Ehsan Latif, Parasuraman, Ramviyas, Paul Spirakis, and Grzegorz Stachowiak}, url = {https://drops.dagstuhl.de/entities/document/10.4230/LIPIcs.ISAAC.2025.35}, doi = {10.4230/LIPIcs.ISAAC.2025.35}, year = {2025}, date = {2025-11-17}, booktitle = {International Symposium on Algorithms and Computation (ISAAC 2025).}, keywords = {localization, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } |
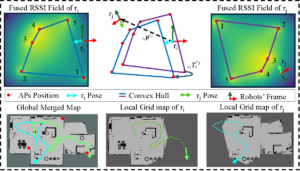 | 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot systems, networking, perception @conference{Ghanta2025b, title = {MGPRL: Distributed Multi-Gaussian Processes for Wi-Fi-based Multi-Robot Relative Localization in Large Indoor Environments}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11247180}, doi = {10.1109/IROS60139.2025.11247180}, year = {2025}, date = {2025-10-19}, booktitle = {2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Relative localization is a crucial capability for multi-robot systems operating in GPS-denied environments. Existing approaches for multi-robot relative localization often depend on costly or short-range sensors like cameras and LiDARs. Consequently, these approaches face challenges such as high computational overhead (e.g., map merging) and difficulties in disjoint environments. To address this limitation, this paper introduces MGPRL, a novel distributed framework for multi-robot relative localization using convex-hull of multiple Wi-Fi access points (AP). To accomplish this, we employ co-regionalized multi-output Gaussian Processes for efficient Radio Signal Strength Indicator (RSSI) field prediction and perform uncertainty-aware multi-AP localization, which is further coupled with weighted convex hull-based alignment for robust relative pose estimation. Each robot predicts the RSSI field of the environment by an online scan of APs in its environment, which are utilized for position estimation of multiple APs. To perform relative localization, each robot aligns the convex hull of its predicted AP locations with that of the neighbor robots. This approach is well-suited for devices with limited computational resources and operates solely on widely available Wi-Fi RSSI measurements without necessitating any dedicated pre-calibration or offline fingerprinting. We rigorously evaluate the performance of the proposed MGPRL in ROS simulations and demonstrate it with real-world experiments, comparing it against multiple state-of-the-art approaches. The results showcase that MGPRL outperforms existing methods in terms of localization accuracy and computational efficiency.}, keywords = {cooperation, localization, multi-robot systems, networking, perception}, pubstate = {published}, tppubtype = {conference} } Relative localization is a crucial capability for multi-robot systems operating in GPS-denied environments. Existing approaches for multi-robot relative localization often depend on costly or short-range sensors like cameras and LiDARs. Consequently, these approaches face challenges such as high computational overhead (e.g., map merging) and difficulties in disjoint environments. To address this limitation, this paper introduces MGPRL, a novel distributed framework for multi-robot relative localization using convex-hull of multiple Wi-Fi access points (AP). To accomplish this, we employ co-regionalized multi-output Gaussian Processes for efficient Radio Signal Strength Indicator (RSSI) field prediction and perform uncertainty-aware multi-AP localization, which is further coupled with weighted convex hull-based alignment for robust relative pose estimation. Each robot predicts the RSSI field of the environment by an online scan of APs in its environment, which are utilized for position estimation of multiple APs. To perform relative localization, each robot aligns the convex hull of its predicted AP locations with that of the neighbor robots. This approach is well-suited for devices with limited computational resources and operates solely on widely available Wi-Fi RSSI measurements without necessitating any dedicated pre-calibration or offline fingerprinting. We rigorously evaluate the performance of the proposed MGPRL in ROS simulations and demonstrate it with real-world experiments, comparing it against multiple state-of-the-art approaches. The results showcase that MGPRL outperforms existing methods in terms of localization accuracy and computational efficiency. |
 | Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols Conference 4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025), 2025. Abstract | Links | BibTeX | Tags: multi-robot systems, networking @conference{Gąsieniec2025, title = {Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols}, author = { Leszek Gąsieniec, Łukasz Kuszner, Ehsan Latif, Ramviyas Parasuraman, Paul Spirakis, Grzegorz Stachowiak}, url = {https://drops.dagstuhl.de/entities/document/10.4230/LIPIcs.SAND.2025.19}, doi = {10.4230/LIPIcs.SAND.2025.19}, year = {2025}, date = {2025-06-02}, booktitle = {4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025)}, abstract = {In the distributed localization problem (DLP), n anonymous robots (agents) A₀, …, A_{n-1} begin at arbitrary positions p₀, …, p_{n-1} ∈ S, where S is a Euclidean space. Initially, each agent A_i operates within its own coordinate system in S, which may be inconsistent with those of other agents. The primary goal in DLP is for agents to reach a consensus on a unified coordinate system that accurately reflects the relative positions of all points, p₀, …, p_{n-1}, in S. Extensive research on DLP has primarily focused on the feasibility and complexity of achieving consensus when agents have limited access to inter-agent distances, often due to missing or imprecise data. In this paper, however, we examine a minimalist, computationally efficient model of distributed computing in which agents have access to all pairwise distances, if needed. Specifically, we introduce a novel variant of population protocols, referred to as the spatial population protocols model. In this variant each agent can memorise one or a fixed number of coordinates, and when agents A_i and A_j interact, they can not only exchange their current knowledge but also either determine the distance d_{ij} between them in S (distance query model) or obtain the vector v→_{ij} spanning points p_i and p_j (vector query model). We present here a leader-based localisation protocol with distance queries. }, keywords = {multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } In the distributed localization problem (DLP), n anonymous robots (agents) A₀, …, A_{n-1} begin at arbitrary positions p₀, …, p_{n-1} ∈ S, where S is a Euclidean space. Initially, each agent A_i operates within its own coordinate system in S, which may be inconsistent with those of other agents. The primary goal in DLP is for agents to reach a consensus on a unified coordinate system that accurately reflects the relative positions of all points, p₀, …, p_{n-1}, in S. Extensive research on DLP has primarily focused on the feasibility and complexity of achieving consensus when agents have limited access to inter-agent distances, often due to missing or imprecise data. In this paper, however, we examine a minimalist, computationally efficient model of distributed computing in which agents have access to all pairwise distances, if needed. Specifically, we introduce a novel variant of population protocols, referred to as the spatial population protocols model. In this variant each agent can memorise one or a fixed number of coordinates, and when agents A_i and A_j interact, they can not only exchange their current knowledge but also either determine the distance d_{ij} between them in S (distance query model) or obtain the vector v→_{ij} spanning points p_i and p_j (vector query model). We present here a leader-based localisation protocol with distance queries. |
2024 |
|
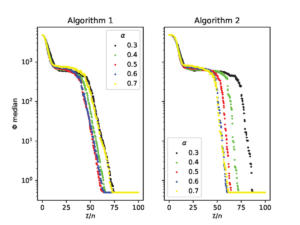
 | Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. Abstract | Links | BibTeX | Tags: cooperation, learning, mapping, multi-robot, networking @article{Latif2024b, title = {Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10413563}, doi = {10.1109/LRA.2024.3358095}, year = {2024}, date = {2024-03-01}, journal = {IEEE Robotics and Automation Letters}, volume = {9}, number = {3}, pages = {2622 - 2629}, abstract = {Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. }, keywords = {cooperation, learning, mapping, multi-robot, networking}, pubstate = {published}, tppubtype = {article} } Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. |
 | Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, networking @article{Latif2023c, title = {Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10185556}, doi = {10.1109/JIOT.2023.3296334}, year = {2024}, date = {2024-01-15}, journal = {IEEE Internet of Things Journal}, volume = {11}, number = {2}, pages = {2783 - 2795}, abstract = {Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. }, keywords = {cooperation, localization, networking}, pubstate = {published}, tppubtype = {article} } Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. |
 | 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: localization, multi-robot, networking @conference{Latif2024c, title = {HGP-RL: Distributed Hierarchical Gaussian Processes for Wi-Fi-based Relative Localization in Multi-Robot Systems }, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802653}, doi = {10.1109/IROS58592.2024.10802653}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3387-3394}, abstract = {Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots.}, keywords = {localization, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots. |
 | Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. Abstract | Links | BibTeX | Tags: computing, multi-robot systems, networking @conference{Tahir2024, title = {Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles}, author = {Nazish Tahir, Ramviyas Parasuraman, Haijian Sun}, url = {https://ieeexplore.ieee.org/abstract/document/10757784}, doi = {10.1109/VTC2024-Fall63153.2024.10757784}, year = {2024}, date = {2024-10-10}, booktitle = {2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall)}, pages = {2577-2465}, abstract = {Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. }, keywords = {computing, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. |
 | Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). Abstract | Links | BibTeX | Tags: multi-robot, networking @conference{Zhang2024, title = {Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications}, author = {Lihao Zhang, Haijian Sun, Jin Sun, Ramviyas Parasuraman, Yinghui Ye, Rose Qingyang Hu}, url = {https://ieeexplore.ieee.org/document/10622509}, doi = {10.1109/ICC51166.2024.10622509}, year = {2024}, date = {2024-06-13}, booktitle = {2024 IEEE International Conference on Communications (ICC)}, abstract = {Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency.}, note = {Accepted for Presentation at ICC 2024}, keywords = {multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency. |
2023 |
|
 | Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. Abstract | Links | BibTeX | Tags: networking, planning @article{Parasuraman2023, title = {Rapid prediction of network quality in mobile robots}, author = {Ramviyas Parasuraman and Byung-Cheol Min and Petter Ögren}, doi = {10.1016/j.adhoc.2022.103014}, issn = {1570-8705}, year = {2023}, date = {2023-01-01}, journal = {Ad Hoc Networks}, volume = {138}, abstract = {Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation.}, keywords = {networking, planning}, pubstate = {published}, tppubtype = {article} } Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation. |
 | Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023c, title = {Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473568}, doi = {10.1109/IRC59093.2023.00060}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency. |
 | Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023b, title = {Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473544}, doi = {10.1109/IRC59093.2023.00059}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems. |
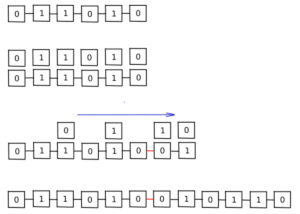
 | Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. Abstract | Links | BibTeX | Tags: cooperation, mapping, multi-robot, multi-robot systems, networking @conference{Latif2023, title = {Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration}, author = {Ehsan Latif and WenZhan Song and Ramviyas Parasuraman}, doi = {10.1109/INFOCOMWKSHPS57453.2023.10226167}, year = {2023}, date = {2023-05-01}, booktitle = {IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS)}, abstract = {Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios.}, keywords = {cooperation, mapping, multi-robot, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios. |
 | Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. Abstract | Links | BibTeX | Tags: autonomy, cooperation, networking @conference{Tahir2023, title = {Mobile Robot Control and Autonomy Through Collaborative Twin}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = { 10.1109/PerComWorkshops56833.2023.10150325}, year = {2023}, date = {2023-03-17}, booktitle = {2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events}, abstract = {When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches.}, keywords = {autonomy, cooperation, networking}, pubstate = {published}, tppubtype = {conference} } When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches. |
2022 |
|
 | Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. Abstract | Links | BibTeX | Tags: control, cooperation, networking @article{Tahir2022b, title = {Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = {10.1109/TSMC.2022.3216206}, issn = {2168-2232}, year = {2022}, date = {2022-12-01}, journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes.}, keywords = {control, cooperation, networking}, pubstate = {published}, tppubtype = {article} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes. |
 | 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), IEEE, 2022. Abstract | Links | BibTeX | Tags: evaluation, networking, robotics @conference{Pandey2022, title = {Empirical Analysis of Bi-directional Wi-Fi Network Performance on Mobile Robots in Indoor Environments}, author = {Pranav Pandey and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2110.03011.pdf Codes: https://github.com/herolab-uga/ros-network-analysis Paper: https://ieeexplore.ieee.org/abstract/document/9860438}, doi = {10.1109/VTC2022-Spring54318.2022.9860438}, year = {2022}, date = {2022-06-22}, booktitle = {2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring)}, pages = {1-7}, publisher = {IEEE}, abstract = {This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments.}, keywords = {evaluation, networking, robotics}, pubstate = {published}, tppubtype = {conference} } This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments. |
 | Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. Abstract | Links | BibTeX | Tags: control, multi-robot systems, networking @workshop{Tahir2022, title = {Collaborative Control of Mobile Robots Using Analog Twin Framework}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://sites.google.com/ualberta.ca/2022workshop-ai-for-hri-cr-ar}, year = {2022}, date = {2022-05-23}, booktitle = {ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications.}, keywords = {control, multi-robot systems, networking}, pubstate = {published}, tppubtype = {workshop} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications. |
2020 |
|
 | Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots Conference The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall , 2020. Abstract | Links | BibTeX | Tags: localization, networking, robotics @conference{Parashar2020, title = {Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots}, author = {Ravi Parashar and Ramviyas Parasuraman}, url = {http://hero.uga.edu/wp-content/uploads/2020/07/ArXiv_VTCW_2020_Parashar.pdf}, year = {2020}, date = {2020-10-05}, booktitle = {The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall }, abstract = {Localization of autonomous vehicles in unknown and unstructured GPS-denied environments is still a relevant and major research challenge in the field of Robotics. Applications of such research can be found in search and rescue missions and connected vehicles, where multiple robots need an efficient solution for simultaneous localization through multi-sensor integration so that they can effectively cooperate and coordinate tasks amongst themselves. In this paper, we propose a novel method for estimating the position of a WiFi access point in relation to a moving robot. Specifically, we exploit the integration of two sensors: Direction-of-arrival (DOA) of WiFi signals and the robot's odometry and combine them with Gaussian probabilistic sampling in a Particle Filter framework. We evaluate the proposed method in terms of accuracy and computational efficiency through extensive trials on datasets gathered from real-world measurements with mobile robots and compared our method against standard approaches. The results demonstrate superior localization accuracy (up to 3x improvement) and capability for most practical applications. }, keywords = {localization, networking, robotics}, pubstate = {published}, tppubtype = {conference} } Localization of autonomous vehicles in unknown and unstructured GPS-denied environments is still a relevant and major research challenge in the field of Robotics. Applications of such research can be found in search and rescue missions and connected vehicles, where multiple robots need an efficient solution for simultaneous localization through multi-sensor integration so that they can effectively cooperate and coordinate tasks amongst themselves. In this paper, we propose a novel method for estimating the position of a WiFi access point in relation to a moving robot. Specifically, we exploit the integration of two sensors: Direction-of-arrival (DOA) of WiFi signals and the robot's odometry and combine them with Gaussian probabilistic sampling in a Particle Filter framework. We evaluate the proposed method in terms of accuracy and computational efficiency through extensive trials on datasets gathered from real-world measurements with mobile robots and compared our method against standard approaches. The results demonstrate superior localization accuracy (up to 3x improvement) and capability for most practical applications. |
 | Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots Workshop RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation, 2020. Abstract | Links | BibTeX | Tags: control, human-robot interaction, networking, robotics @workshop{Tahir2020, title = {Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ankitbhatia.github.io/reacting_contact_workshop/}, year = {2020}, date = {2020-07-12}, booktitle = {RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation}, abstract = {Adaptation to increasing levels of autonomy - from manual teleoperation to complete automation is of particular interest to Field Robotics and Human-Robot Interaction community. Towards that line of research, we introduce and investigate a novel bilaterally teleoperation control strategy for a robot to the robot system. A bilateral teleoperation scheme is typically applied to human control of robots. In this abstract, we look at a different perspective of using a bilateral teleoperation system between robots, where one robot (Labor) is teleoperated by an autonomous robot (Master). To realize such a strategy, our proposed robot-system is divided into a master-labor networked scheme where the master robot is located at a remote site operable by a human user or an autonomous agent and a labor robot; the follower robot is located on operation site. The labor robot is capable of reflecting the odometry commands of the master robot meanwhile also navigating its environment by obstacle detection and avoidance mechanism. An autonomous algorithm such as a typical SLAM-based path planner is controlling the master robot, which is provided with a suitable force feedback informative of the labor response by its interaction with the environment. We perform preliminary experiments to verify the system feasibility and analyze the motion transparency in different scenarios. The results show promise to investigate this research further and develop this work towards human multi-robot teleoperation.}, keywords = {control, human-robot interaction, networking, robotics}, pubstate = {published}, tppubtype = {workshop} } Adaptation to increasing levels of autonomy - from manual teleoperation to complete automation is of particular interest to Field Robotics and Human-Robot Interaction community. Towards that line of research, we introduce and investigate a novel bilaterally teleoperation control strategy for a robot to the robot system. A bilateral teleoperation scheme is typically applied to human control of robots. In this abstract, we look at a different perspective of using a bilateral teleoperation system between robots, where one robot (Labor) is teleoperated by an autonomous robot (Master). To realize such a strategy, our proposed robot-system is divided into a master-labor networked scheme where the master robot is located at a remote site operable by a human user or an autonomous agent and a labor robot; the follower robot is located on operation site. The labor robot is capable of reflecting the odometry commands of the master robot meanwhile also navigating its environment by obstacle detection and avoidance mechanism. An autonomous algorithm such as a typical SLAM-based path planner is controlling the master robot, which is provided with a suitable force feedback informative of the labor response by its interaction with the environment. We perform preliminary experiments to verify the system feasibility and analyze the motion transparency in different scenarios. The results show promise to investigate this research further and develop this work towards human multi-robot teleoperation. |
2019 |
|
 | Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks Journal Article Robotics and Autonomous Systems, 111 , pp. 73-87, 2019. Abstract | Links | BibTeX | Tags: multi-robot, networking, robotics @article{Tardioli2018, title = {Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks}, author = {Danilo Tardioli and Ramviyas Parasuraman and Petter Ögren. }, url = {https://www.sciencedirect.com/science/article/pii/S0921889017309144}, doi = {10.1016/j.robot.2018.10.009}, year = {2019}, date = {2019-01-01}, journal = {Robotics and Autonomous Systems}, volume = {111}, pages = {73-87}, abstract = {The Robot Operating System (ROS) is a popular and widely used software framework for building robotics systems. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes presents several issues regarding limited-bandwidth, delays, and jitter, when used in wireless multi-hop networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance by reducing delay and jitter in data exchanges, especially in multi-hop networks. Pound allows the use of multiple ROS masters (roscores), features data compression, and importantly, introduces a priority scheme that allows favoring more important flows over less important ones. We compare Pound to the state-of-the-art solutions through extensive experiments and show that it performs equally well, or better in all the test cases, including a control-over-network example.}, keywords = {multi-robot, networking, robotics}, pubstate = {published}, tppubtype = {article} } The Robot Operating System (ROS) is a popular and widely used software framework for building robotics systems. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes presents several issues regarding limited-bandwidth, delays, and jitter, when used in wireless multi-hop networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance by reducing delay and jitter in data exchanges, especially in multi-hop networks. Pound allows the use of multiple ROS masters (roscores), features data compression, and importantly, introduces a priority scheme that allows favoring more important flows over less important ones. We compare Pound to the state-of-the-art solutions through extensive experiments and show that it performs equally well, or better in all the test cases, including a control-over-network example. |
 | Wisture: Touch-less Hand Gesture Classification in Unmodified Smartphones Using Wi-Fi Signals Journal Article IEEE Sensors Journal, 19 (1), pp. 257-267, 2019. Abstract | Links | BibTeX | Tags: networking, perception, robotics @article{Haseeb2018, title = {Wisture: Touch-less Hand Gesture Classification in Unmodified Smartphones Using Wi-Fi Signals}, author = {Mohamed Haseeb and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/8493572}, doi = {10.1109/JSEN.2018.2876448}, year = {2019}, date = {2019-01-01}, journal = { IEEE Sensors Journal}, volume = {19}, number = {1}, pages = {257-267}, abstract = {This paper introduces Wisture, a new online machine learning solution for recognizing touch-less dynamic hand gestures on a smartphone. Wisture relies on the standard Wi-Fi Received Signal Strength (RSS) using a Long Short-Term Memory (LSTM) Recurrent Neural Network (RNN), thresholding filters and traffic induction. Unlike other Wi-Fi based gesture recognition methods, the proposed method does not require a modification of the smartphone hardware or the operating system, and performs the gesture recognition without interfering with the normal operation of other smartphone applications. We discuss the characteristics of Wisture, and conduct extensive experiments to compare its performance against state-of-the-art machine learning solutions in terms of both accuracy and time efficiency. The experiments include a set of different scenarios in terms of both spatial setup and traffic between the smartphone and Wi-Fi access points (AP). The results show that Wisture achieves an online recognition accuracy of up to 94% (average 78%) in detecting and classifying three hand gestures.}, keywords = {networking, perception, robotics}, pubstate = {published}, tppubtype = {article} } This paper introduces Wisture, a new online machine learning solution for recognizing touch-less dynamic hand gestures on a smartphone. Wisture relies on the standard Wi-Fi Received Signal Strength (RSS) using a Long Short-Term Memory (LSTM) Recurrent Neural Network (RNN), thresholding filters and traffic induction. Unlike other Wi-Fi based gesture recognition methods, the proposed method does not require a modification of the smartphone hardware or the operating system, and performs the gesture recognition without interfering with the normal operation of other smartphone applications. We discuss the characteristics of Wisture, and conduct extensive experiments to compare its performance against state-of-the-art machine learning solutions in terms of both accuracy and time efficiency. The experiments include a set of different scenarios in terms of both spatial setup and traffic between the smartphone and Wi-Fi access points (AP). The results show that Wisture achieves an online recognition accuracy of up to 94% (average 78%) in detecting and classifying three hand gestures. |
2018 |
|
 | Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. Abstract | Links | BibTeX | Tags: control, multi-robot, networking, robotics @conference{Parasuraman2018, title = {Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals}, author = {Ramviyas Parasuraman and Byung-Cheol Min.}, url = {https://www.youtube.com/watch?v=6BkFrJ8vceg&feature=youtu.be}, year = {2018}, date = {2018-10-15}, abstract = {In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers.}, keywords = {control, multi-robot, networking, robotics}, pubstate = {published}, tppubtype = {conference} } In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers. |
 | 2018. Abstract | Links | BibTeX | Tags: networking, robotics @conference{Parasuraman2018d, title = {Kalman filter based spatial prediction of wireless connectivity for autonomous robots and connected vehicles}, author = {Ramviyas Parasuraman, Petter Ögren, Byung-Cheol Min}, url = {https://www.researchgate.net/publication/326235283_Kalman_Filter_Based_Spatial_Prediction_of_Wireless_Connectivity_for_Autonomous_Robots_and_Connected_Vehicles}, year = {2018}, date = {2018-08-27}, abstract = {This paper proposes a new Kalman filter based online framework to estimate the spatial wireless connectivity in terms of received signal strength (RSS), which is composed of path loss and the shadow fading variance of a wireless channel in autonomous vehicles. The path loss is estimated using a localized least squares method and the shadowing effect is predicted with an empirical (exponential) variogram. A discrete Kalman Filter is used to fuse these two models into a statespace formulation. The approach is unique in a sense that it is online and does not require the exact source location to be known apriori. We evaluated the method using real-world measurements dataset from both indoors and outdoor environments. The results show significant performance improvements compared to state-of-the-art methods using Gaussian processes or Kriging interpolation algorithms. We are able to achieve a mean prediction accuracy of up to 96% for predicting RSS as far as 20 meters ahead in the robot s trajectory.}, keywords = {networking, robotics}, pubstate = {published}, tppubtype = {conference} } This paper proposes a new Kalman filter based online framework to estimate the spatial wireless connectivity in terms of received signal strength (RSS), which is composed of path loss and the shadow fading variance of a wireless channel in autonomous vehicles. The path loss is estimated using a localized least squares method and the shadowing effect is predicted with an empirical (exponential) variogram. A discrete Kalman Filter is used to fuse these two models into a statespace formulation. The approach is unique in a sense that it is online and does not require the exact source location to be known apriori. We evaluated the method using real-world measurements dataset from both indoors and outdoor environments. The results show significant performance improvements compared to state-of-the-art methods using Gaussian processes or Kriging interpolation algorithms. We are able to achieve a mean prediction accuracy of up to 96% for predicting RSS as far as 20 meters ahead in the robot s trajectory. |
Publications
2026 |
|
| Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| DCL-Sparse: Distributed Relative Localization in Sparse Graphs Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
2025 |
|
| Real-World Cyber Security Demonstration for Networked Electric Drives Journal Article IEEE Journal of Emerging and Selected Topics in Power Electronics, 13 (4), 2025. |
| Edge Computing and its Application in Robotics: A Survey Journal Article Journal of Sensor and Actuator Networks, 14 (4), 2025. |
| Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. |
| Anonymous Distributed Localisation via Spatial Population Protocols Conference International Symposium on Algorithms and Computation (ISAAC 2025)., 2025. |
| 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. |
| Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols Conference 4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025), 2025. |
2024 |
|
| Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. |
| Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. |
| 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. |
| Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). |
2023 |
|
| Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. |
| Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. |
| Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. |
2022 |
|
| Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. |
| 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), IEEE, 2022. |
| Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. |
2020 |
|
| Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots Conference The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall , 2020. |
| Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots Workshop RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation, 2020. |
2019 |
|
| Pound: A multi-master ROS node for reducing delay and jitter in wireless multi-robot networks Journal Article Robotics and Autonomous Systems, 111 , pp. 73-87, 2019. |
| Wisture: Touch-less Hand Gesture Classification in Unmodified Smartphones Using Wi-Fi Signals Journal Article IEEE Sensors Journal, 19 (1), pp. 257-267, 2019. |
2018 |
|
| Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. |
| 2018. |