
2026 |
|
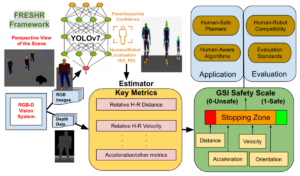 | 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, evaluation, human-robot interaction @conference{Pandey2026, title = {FRESHR-GSI: A Generalized Safety Model and Evaluation Framework for Mobile Robots in Multi-Human Environments}, author = {Pranav Pandey and Ramviyas Parasuraman and Prashant Doshi}, url = {https://arxiv.org/abs/2501.03467}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Human safety is critical in applications involving close human-robot interactions (HRI) and is a key aspect of physical compatibility between humans and robots. While measures of human safety in HRI exist, these mainly target industrial settings involving robotic manipulators. Less attention has been paid to settings where mobile robots and humans share the space. This paper introduces a new robot-centered directional framework of human safety. It is particularly useful for evaluating mobile robots as they operate in environments populated by multiple humans. The framework integrates several key metrics, such as each human’s relative distance, speed, and orientation. The core novelty lies in the framework’s flexibility to accommodate different application requirements while allowing for both the robot-centered and external observer points of view. We instantiate the framework by using RGB-D based vision integrated with a deep learning-based human detection pipeline to yield a proxemics-guided generalized safety index (GSI) that instantaneously assesses human safety. We extensively validate GSI’s capability of producing appropriate and fine-grained safety measures in real-world experimental scenarios and demonstrate its superior efficacy against extant safety models.}, keywords = {control, evaluation, human-robot interaction}, pubstate = {published}, tppubtype = {conference} } Human safety is critical in applications involving close human-robot interactions (HRI) and is a key aspect of physical compatibility between humans and robots. While measures of human safety in HRI exist, these mainly target industrial settings involving robotic manipulators. Less attention has been paid to settings where mobile robots and humans share the space. This paper introduces a new robot-centered directional framework of human safety. It is particularly useful for evaluating mobile robots as they operate in environments populated by multiple humans. The framework integrates several key metrics, such as each human’s relative distance, speed, and orientation. The core novelty lies in the framework’s flexibility to accommodate different application requirements while allowing for both the robot-centered and external observer points of view. We instantiate the framework by using RGB-D based vision integrated with a deep learning-based human detection pipeline to yield a proxemics-guided generalized safety index (GSI) that instantaneously assesses human safety. We extensively validate GSI’s capability of producing appropriate and fine-grained safety measures in real-world experimental scenarios and demonstrate its superior efficacy against extant safety models. |
2022 |
|
 | 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), IEEE, 2022. Abstract | Links | BibTeX | Tags: evaluation, networking, robotics @conference{Pandey2022, title = {Empirical Analysis of Bi-directional Wi-Fi Network Performance on Mobile Robots in Indoor Environments}, author = {Pranav Pandey and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2110.03011.pdf Codes: https://github.com/herolab-uga/ros-network-analysis Paper: https://ieeexplore.ieee.org/abstract/document/9860438}, doi = {10.1109/VTC2022-Spring54318.2022.9860438}, year = {2022}, date = {2022-06-22}, booktitle = {2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring)}, pages = {1-7}, publisher = {IEEE}, abstract = {This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments.}, keywords = {evaluation, networking, robotics}, pubstate = {published}, tppubtype = {conference} } This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments. |
2021 |
|
 | 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. Abstract | Links | BibTeX | Tags: evaluation, multi-robot, planning, trust @conference{Yang2021, title = {How Can Robots Trust Each Other For Better Cooperation? A Relative Needs Entropy Based Robot-Robot Trust Assessment Model}, author = {Qin Yang and Ramviyas Parasuraman}, doi = {10.1109/SMC52423.2021.9659187}, year = {2021}, date = {2021-10-20}, booktitle = {2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC)}, pages = {2656--2663}, publisher = {IEEE}, organization = {IEEE}, abstract = {Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models.}, keywords = {evaluation, multi-robot, planning, trust}, pubstate = {published}, tppubtype = {conference} } Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models. |