
2026 |
|
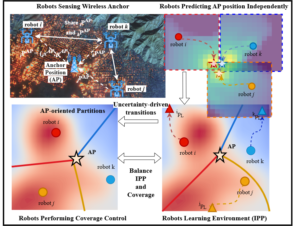 | Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, localization, mapping, multi-robot systems, planning @conference{Munir2026, title = {Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___multi_robot_informative_path_planning_without_global_localization/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage.}, keywords = {control, cooperation, localization, mapping, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage. |
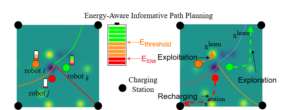 | Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, planning @conference{Munir2026b, title = {Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems}, author = {Aiman Munir and Aryan Dutta and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___energy_aware_ipp/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation.}, keywords = {control, cooperation, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation. |
 | Imitation-BT: Automating Behavior Tree Generation by Echoing Reinforcement Learning Agents Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: autonomy, behavior-trees, learning, planning @conference{Bthula2026, title = {Imitation-BT: Automating Behavior Tree Generation by Echoing Reinforcement Learning Agents}, author = {Shailendra Sekhar Bthula and Ramviyas Parasuraman}, url = {https://herolab.org/bathula___icra_2026___imitationbt__behavior_trees_learned_from_rl_models_v2/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Understanding an autonomous agent's decision-making prowess is of paramount importance, as it increases trust and guarantees safety. Although agent policies learned through reinforcement learning (RL) and machine learning (ML) paradigms have demonstrated their dominance in various domains, they struggle with deployment in high-stakes environments due to their algorithmic opacity. A structured and transparent representation of a policy helps us understand, evaluate, and modify it if necessary. Due to their inherent reactivity, modularity, and transparent hierarchical representation, the Behavior Tree (BT) is an ideal solution to represent control policies. In this paper, we focus on building a knowledge representation transfer framework in which knowledge of trained RL agents is captured through imitation learning and then utilized to form a compact BT. Our primary focus is to retain maximum performance while improving the interpretability of the BTs. In combination with planning and learning, we automate the formation of a BT and offer an alternative, transparent architecture for policy representation. In an extensive analysis with a variety of gymnasium environments and the Robotics Package Delivery domain simulations, we demonstrate the significant performance retention capability and superior interpretability of the proposed Imitation-BT. }, keywords = {autonomy, behavior-trees, learning, planning}, pubstate = {published}, tppubtype = {conference} } Understanding an autonomous agent's decision-making prowess is of paramount importance, as it increases trust and guarantees safety. Although agent policies learned through reinforcement learning (RL) and machine learning (ML) paradigms have demonstrated their dominance in various domains, they struggle with deployment in high-stakes environments due to their algorithmic opacity. A structured and transparent representation of a policy helps us understand, evaluate, and modify it if necessary. Due to their inherent reactivity, modularity, and transparent hierarchical representation, the Behavior Tree (BT) is an ideal solution to represent control policies. In this paper, we focus on building a knowledge representation transfer framework in which knowledge of trained RL agents is captured through imitation learning and then utilized to form a compact BT. Our primary focus is to retain maximum performance while improving the interpretability of the BTs. In combination with planning and learning, we automate the formation of a BT and offer an alternative, transparent architecture for policy representation. In an extensive analysis with a variety of gymnasium environments and the Robotics Package Delivery domain simulations, we demonstrate the significant performance retention capability and superior interpretability of the proposed Imitation-BT. |
2025 |
|
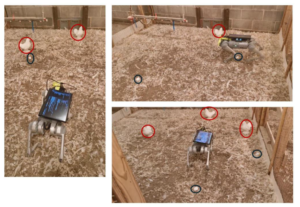 | Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility Journal Article American Society of Agricultural and Biological Engineers, 41 (6), pp. 733-747, 2025. Abstract | Links | BibTeX | Tags: autonomy, control, navigation, perception, planning @article{Mandiga2025, title = {Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility}, author = {Aravind Mandiga, Guoming Li, Tianming Liu, Ramviyas Parasuraman, Ramana M Pidaparti, Venkat UC Bodempudi, and Samuel E Aggrey}, url = {https://elibrary.asabe.org/abstract.asp?AID=55713}, doi = {10.13031/aea.16384}, year = {2025}, date = {2025-01-01}, journal = {American Society of Agricultural and Biological Engineers}, volume = {41}, number = {6}, pages = {733-747}, abstract = { Floor eggs (i.e., eggs laid on the litter floor) are a major problem in cage-free hen systems and account for approximately 5% to 6% of daily egg production. Floor eggs may be contaminated and pecked by birds, which can induce egg eating, degradation of egg quality, and risk of additional floor eggs if not collected in a timely manner. Currently, floor eggs require time-consuming manual collection in daily flock inspection. The objective was to develop autonomous navigation for a quadruped robot to approach floor eggs and to evaluate commercial feasibility through optimized routing strategies. The robot was equipped with an RGB-Depth camera for object detection and depth estimation, and multiple deep learning object detection models were evaluated. Mathematical operations associated with imagery coordinates are converted to real-world trajectories for robot movement controls. The robot was tested at speeds of 0.27, 0.34, 0.41, 0.52, and 0.68 m/s to approach floor eggs. Results show the model successfully localizes floor eggs and hens with over 95% precision, recall, and mAP50(B). The robot approaches floor eggs with an average accuracy of 90%. Commercial feasibility was assessed through mathematical optimization analysis using boustrophedon cellular decomposition for two payload scenarios (50 and 77 eggs) in a typical 50,000-hen facility (380 x 18.2 m). Optimization analysis demonstrated operational viability with total daily travel distances of 10.7 km (50-egg payload) and 7.8 km (77-egg payload) for seven daily charge cycles, successfully transferring 2,000 floor eggs to the conveyor belts. These findings show great potential for quadruped robot navigation and commercial implementation for floor egg collection.}, keywords = {autonomy, control, navigation, perception, planning}, pubstate = {published}, tppubtype = {article} } Floor eggs (i.e., eggs laid on the litter floor) are a major problem in cage-free hen systems and account for approximately 5% to 6% of daily egg production. Floor eggs may be contaminated and pecked by birds, which can induce egg eating, degradation of egg quality, and risk of additional floor eggs if not collected in a timely manner. Currently, floor eggs require time-consuming manual collection in daily flock inspection. The objective was to develop autonomous navigation for a quadruped robot to approach floor eggs and to evaluate commercial feasibility through optimized routing strategies. The robot was equipped with an RGB-Depth camera for object detection and depth estimation, and multiple deep learning object detection models were evaluated. Mathematical operations associated with imagery coordinates are converted to real-world trajectories for robot movement controls. The robot was tested at speeds of 0.27, 0.34, 0.41, 0.52, and 0.68 m/s to approach floor eggs. Results show the model successfully localizes floor eggs and hens with over 95% precision, recall, and mAP50(B). The robot approaches floor eggs with an average accuracy of 90%. Commercial feasibility was assessed through mathematical optimization analysis using boustrophedon cellular decomposition for two payload scenarios (50 and 77 eggs) in a typical 50,000-hen facility (380 x 18.2 m). Optimization analysis demonstrated operational viability with total daily travel distances of 10.7 km (50-egg payload) and 7.8 km (77-egg payload) for seven daily charge cycles, successfully transferring 2,000 floor eggs to the conveyor belts. These findings show great potential for quadruped robot navigation and commercial implementation for floor egg collection. |
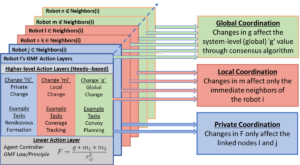 | 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Starks2025, title = {GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems}, author = {Michael Starks and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11128543/}, doi = {10.1109/ICRA55743.2025.11128543}, year = {2025}, date = {2025-05-23}, booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)}, abstract = {Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws.}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws. |
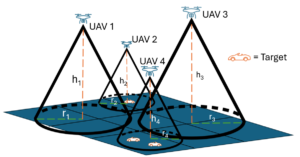 | H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking Workshop IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES, 2025. Abstract | Links | BibTeX | Tags: autonomy, control, multi-robot systems, planning @workshop{Nistane2025, title = {H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking}, author = {Swaraj Nistane, Tohid Tasooji, and Ramviyas Parasuraman}, url = {https://aerial-robotics-workshop-icra.com/wp-content/uploads/2025/05/Poster14.pdf}, year = {2025}, date = {2025-05-19}, booktitle = {IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES}, abstract = {This paper presents a distributed multi-target coverage control framework for multiple unmanned aerial vehicle (UAV) systems that integrates Voronoi-based coverage control with altitude optimization. The proposed method enables robots to adjust their positions and altitudes dynamically to optimize sensing performance across varying target distributions. The framework effectively balances trade-offs between detection costs and coverage area by determining the optimal position and altitude for each robot. This allows the system to adapt to different environmental conditions and target densities, ensuring optimal performance in various scenarios. In the proposed framework, robots descend to lower altitudes in high-density target regions to improve detection accuracy, while in sparse regions, they ascend to maximize coverage. A minimum altitude constraint is obtained to maintain precise tracking in dense areas, ensuring that robots do not operate at excessively low altitudes. The approach guarantees complete coverage of the target space by guiding robots toward the weighted centroids of their respective Voronoi cells, thereby ensuring efficient task allocation and spatial distribution. Simulation experiments demonstrate the effectiveness of the proposed framework in improving tracking accuracy and coverage efficiency in different environments. The results validate the capability of the framework to handle real-time, multi-target tracking and sensor coverage in complex target distributions.}, keywords = {autonomy, control, multi-robot systems, planning}, pubstate = {published}, tppubtype = {workshop} } This paper presents a distributed multi-target coverage control framework for multiple unmanned aerial vehicle (UAV) systems that integrates Voronoi-based coverage control with altitude optimization. The proposed method enables robots to adjust their positions and altitudes dynamically to optimize sensing performance across varying target distributions. The framework effectively balances trade-offs between detection costs and coverage area by determining the optimal position and altitude for each robot. This allows the system to adapt to different environmental conditions and target densities, ensuring optimal performance in various scenarios. In the proposed framework, robots descend to lower altitudes in high-density target regions to improve detection accuracy, while in sparse regions, they ascend to maximize coverage. A minimum altitude constraint is obtained to maintain precise tracking in dense areas, ensuring that robots do not operate at excessively low altitudes. The approach guarantees complete coverage of the target space by guiding robots toward the weighted centroids of their respective Voronoi cells, thereby ensuring efficient task allocation and spatial distribution. Simulation experiments demonstrate the effectiveness of the proposed framework in improving tracking accuracy and coverage efficiency in different environments. The results validate the capability of the framework to handle real-time, multi-target tracking and sensor coverage in complex target distributions. |
 | IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction, 2025. Abstract | Links | BibTeX | Tags: mapping, multi-robot systems, perception, planning @workshop{Ghanta2025d, title = {SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://cearlab.github.io/blockbyblock.github.io/index.html}, year = {2025}, date = {2025-05-19}, booktitle = {IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction}, abstract = {Multi-robot systems hold promise for accelerating cooperative construction tasks such as site preparation and modular assembly. However, dynamic inter-robot occlusions in 3D point-cloud mapping introduce ghosting artifacts that compromise surface reconstruction accuracy and impede downstream planning for grading and leveling. Furthermore, traditional 2D grid-based frontier approaches fail to capture volumetric nuances in partially reconstructed areas, limiting exploration. We propose SPACE, a semi-distributed framework that (1) employs geometric mutual-awareness coupled with image-plane clustering to suppress dynamic robot artifacts, and (2) introduces a bi-variate frontier detection and assignment scheme that classifies and prioritizes both unexplored and weakly mapped regions. SPACE achieves up to 99% reduction in ghosting volume and 95% exploration coverage in ROS-Gazebo experiments and real-world experiments. }, keywords = {mapping, multi-robot systems, perception, planning}, pubstate = {published}, tppubtype = {workshop} } Multi-robot systems hold promise for accelerating cooperative construction tasks such as site preparation and modular assembly. However, dynamic inter-robot occlusions in 3D point-cloud mapping introduce ghosting artifacts that compromise surface reconstruction accuracy and impede downstream planning for grading and leveling. Furthermore, traditional 2D grid-based frontier approaches fail to capture volumetric nuances in partially reconstructed areas, limiting exploration. We propose SPACE, a semi-distributed framework that (1) employs geometric mutual-awareness coupled with image-plane clustering to suppress dynamic robot artifacts, and (2) introduces a bi-variate frontier detection and assignment scheme that classifies and prioritizes both unexplored and weakly mapped regions. SPACE achieves up to 99% reduction in ghosting volume and 95% exploration coverage in ROS-Gazebo experiments and real-world experiments. |
2024 |
|
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Munir2024b, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir and Ayan Dutta and Ramviyas Parasuraman}, url = {https://link.springer.com/chapter/10.1007/978-3-032-04584-3_15}, doi = {10.1007/978-3-032-04584-3_15}, year = {2024}, date = {2024-10-31}, booktitle = {The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {In Press}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot, planning @conference{Munir2024, title = {Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802222}, doi = {10.1109/IROS58592.2024.10802222}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3395-3402}, abstract = {Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. }, keywords = {cooperation, localization, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. |
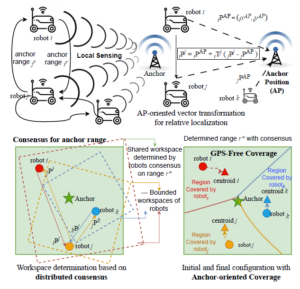 | Anchor-oriented Multi-Robot Coverage without Global Localization Workshop IEEE ICRA 2024 Workshop on Sensing and Perception in Extreme Environments (HERMES), 2024, (Spotlight Presentation). Abstract | Links | BibTeX | Tags: localization, multi-robot systems, planning @workshop{Munir2024d, title = {Anchor-oriented Multi-Robot Coverage without Global Localization}, author = {Aiman Munir, Ehsan Latif, and Ramviyas Parasuraman}, url = {https://hermes-workshop.com/2024.html}, year = {2024}, date = {2024-05-13}, booktitle = {IEEE ICRA 2024 Workshop on Sensing and Perception in Extreme Environments (HERMES)}, abstract = {Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must explore unknown spatial fields collaboratively in GPS-denied environments without compromising their location privacy. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic Voronoi partitions with only relative position measurements. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robot's relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the performance of the proposed anchor-oriented approach using relative localization matches with the state-of-the-art coverage controller with global localization.}, note = {Spotlight Presentation}, keywords = {localization, multi-robot systems, planning}, pubstate = {published}, tppubtype = {workshop} } Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must explore unknown spatial fields collaboratively in GPS-denied environments without compromising their location privacy. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic Voronoi partitions with only relative position measurements. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robot's relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the performance of the proposed anchor-oriented approach using relative localization matches with the state-of-the-art coverage controller with global localization. |
2023 |
|
 | Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot, planning @article{Munir2022b, title = {Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1424-8220/23/23/9600}, doi = {10.3390/s23239600}, year = {2023}, date = {2023-12-04}, journal = {Sensors}, volume = {23}, number = {23}, abstract = {Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable.}, keywords = {control, mapping, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable. |
 | On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning Journal Article Algorithms, 16 (11), pp. 498, 2023. Abstract | Links | BibTeX | Tags: planning @article{Latif2023e, title = {On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1999-4893/16/11/498}, doi = {10.3390/a16110498}, year = {2023}, date = {2023-10-27}, journal = {Algorithms}, volume = {16}, number = {11}, pages = {498}, abstract = {In the mathematical discipline of computational geometry (CG), practical algorithms for resolving geometric input and output issues are designed, analyzed, and put into practice. It is sometimes used to refer to pattern recognition and to define the solid modeling methods for manipulating curves and surfaces. CG is a rich field encompassing theories to solve complex optimization problems, such as path planning for mobile robot systems and extension to distributed multi-robot systems. This brief review discusses the fundamentals of CG and its application in solving well-known automated path-planning problems in single- and multi-robot systems. We also discuss three winning algorithms from the CG-SHOP (Computational Geometry: Solving Hard Optimization Problems) 2021 competition to evidence the practicality of CG in multi-robotic systems. We also mention some open problems at the intersection of CG and robotics. This review provides insights into the potential use of CG in robotics and future research directions at their intersection.}, keywords = {planning}, pubstate = {published}, tppubtype = {article} } In the mathematical discipline of computational geometry (CG), practical algorithms for resolving geometric input and output issues are designed, analyzed, and put into practice. It is sometimes used to refer to pattern recognition and to define the solid modeling methods for manipulating curves and surfaces. CG is a rich field encompassing theories to solve complex optimization problems, such as path planning for mobile robot systems and extension to distributed multi-robot systems. This brief review discusses the fundamentals of CG and its application in solving well-known automated path-planning problems in single- and multi-robot systems. We also discuss three winning algorithms from the CG-SHOP (Computational Geometry: Solving Hard Optimization Problems) 2021 competition to evidence the practicality of CG in multi-robotic systems. We also mention some open problems at the intersection of CG and robotics. This review provides insights into the potential use of CG in robotics and future research directions at their intersection. |
 | KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. Abstract | Links | BibTeX | Tags: autonomy, behavior-trees, heterogeneity, multi-robot, planning @article{Venkata2023b, title = {KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems}, author = {Sanjay Sarma Oruganti Venkata, Ramviyas Parasuraman, Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/abstract/document/10183654}, doi = {10.1109/TRO.2023.3290449}, year = {2023}, date = {2023-07-13}, journal = {IEEE Transactions on Robotics}, volume = {30}, number = {5}, pages = {4114 - 4130}, abstract = {Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights.}, keywords = {autonomy, behavior-trees, heterogeneity, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights. |
 | Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. Abstract | Links | BibTeX | Tags: networking, planning @article{Parasuraman2023, title = {Rapid prediction of network quality in mobile robots}, author = {Ramviyas Parasuraman and Byung-Cheol Min and Petter Ögren}, doi = {10.1016/j.adhoc.2022.103014}, issn = {1570-8705}, year = {2023}, date = {2023-01-01}, journal = {Ad Hoc Networks}, volume = {138}, abstract = {Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation.}, keywords = {networking, planning}, pubstate = {published}, tppubtype = {article} } Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation. |
 | The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). Abstract | Links | BibTeX | Tags: cooperation, multi-robot-systems, multiagent-systems, planning @conference{Yang2023, title = {A hierarchical game-theoretic decision-making for cooperative multiagent systems under the presence of adversarial agents}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://acmsac-irmas2023.isr.uc.pt/index.php/track-program}, year = {2023}, date = {2023-03-31}, booktitle = {The 38th ACM/SIGAPP Symposium On Applied Computing}, series = {IRMAS}, abstract = {Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, note = {Oral Presentation. Acceptance Rate: <25%}, keywords = {cooperation, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). Abstract | Links | BibTeX | Tags: control, multi-robot, planning @workshop{Munir2023, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir, Ayan Dutta, and Ramviyas Parasuraman}, url = {https://sites.bu.edu/mrs2023/program/list-of-accepted-papers-and-presentations/}, year = {2023}, date = {2023-12-06}, booktitle = {IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {Presented as Poster Paper}, keywords = {control, multi-robot, planning}, pubstate = {published}, tppubtype = {workshop} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
2022 |
|
 | Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. Abstract | Links | BibTeX | Tags: control, multi-robot-systems, multiagent-systems, planning @conference{Yang2022, title = {Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy}, author = {Qin Yang and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2206.01109.pdf Paper: https://ieeexplore.ieee.org/abstract/document/9861828 Codes: https://github.com/herolab-uga/gut-pursuit-evasion-robotarium}, year = {2022}, date = {2022-06-21}, booktitle = {ISR Europe 2022; 54th International Symposium on Robotics }, pages = {278-284}, abstract = {Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {control, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Latif2022, title = {Energy-Aware Multi-Robot Task Allocation in Persistent Tasks}, author = {Ehsan Latif and Yikang Gui and Aiman Munir and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, journal = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics}, abstract = {The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach. |
 | Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Gui2022, title = {Message Expiration-Based Distributed Multi-Robot Task Management}, author = {Yikang Gui and Ehsan Latif and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, abstract = {Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach. |
 | A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. Abstract | Links | BibTeX | Tags: cooperation, multiagent-systems, planning @workshop{Yang2022b, title = {A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dcslgatech.github.io/iros22-multi-agent-workshop/#section-program https://dcslgatech.github.io/iros22-multi-agent-workshop/contributed_papers/IROS22-DMMAS_paper_6456.pdf https://dcslgatech.github.io/iros22-multi-agent-workshop/posters/DMMAS_6456.pdf}, year = {2022}, date = {2022-10-27}, booktitle = {IROS 2022 Workshop on Decision Making in Multi-Agent Systems}, abstract = {Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {cooperation, multiagent-systems, planning}, pubstate = {published}, tppubtype = {workshop} } Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
2021 |
|
 | 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. Abstract | Links | BibTeX | Tags: evaluation, multi-robot, planning, trust @conference{Yang2021, title = {How Can Robots Trust Each Other For Better Cooperation? A Relative Needs Entropy Based Robot-Robot Trust Assessment Model}, author = {Qin Yang and Ramviyas Parasuraman}, doi = {10.1109/SMC52423.2021.9659187}, year = {2021}, date = {2021-10-20}, booktitle = {2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC)}, pages = {2656--2663}, publisher = {IEEE}, organization = {IEEE}, abstract = {Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models.}, keywords = {evaluation, multi-robot, planning, trust}, pubstate = {published}, tppubtype = {conference} } Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models. |
2019 |
|
 | Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments Conference Int. Symp. on Multi Robot Systems (MRS), Rutgers, NJ, USA 2019. Abstract | BibTeX | Tags: cooperation, multi-robot systems, planning @conference{Yang2019, title = {Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments}, author = {Qin Yang and Zhiwei Luo and Wenzhan Song and Ramviyas Parasuraman}, year = {2019}, date = {2019-08-22}, booktitle = {Int. Symp. on Multi Robot Systems (MRS)}, organization = {Rutgers, NJ, USA}, abstract = {Multi-Robot Systems and Swarms are intelligent systems in which a large number of agents are coordinated in a distributed and decentralized way. Each robot may have homogeneous or heterogeneous capabilities and can be programmed with several fundamental control laws adapting to the environment. Through different kinds of relationships built using the communication protocols, they present various behaviors based on the shared information and current state. To adapt to dynamic environments effectively, and maximize the utility of the group, robots need to cooperate, share their local information, and make a suitable plan according to the specific scenario. In this paper, we formalize the problem of multi-robots fulfilling dynamic tasks using state transitions represented through a Behavior Tree. We design a framework with corresponding distributed algorithms for communications between robots and negotiation and agreement protocols through a novel priority mechanism. Finally, we evaluate our framework through simulation experiments.}, keywords = {cooperation, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems and Swarms are intelligent systems in which a large number of agents are coordinated in a distributed and decentralized way. Each robot may have homogeneous or heterogeneous capabilities and can be programmed with several fundamental control laws adapting to the environment. Through different kinds of relationships built using the communication protocols, they present various behaviors based on the shared information and current state. To adapt to dynamic environments effectively, and maximize the utility of the group, robots need to cooperate, share their local information, and make a suitable plan according to the specific scenario. In this paper, we formalize the problem of multi-robots fulfilling dynamic tasks using state transitions represented through a Behavior Tree. We design a framework with corresponding distributed algorithms for communications between robots and negotiation and agreement protocols through a novel priority mechanism. Finally, we evaluate our framework through simulation experiments. |
Publications
2026 |
|
| Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
| Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
| Imitation-BT: Automating Behavior Tree Generation by Echoing Reinforcement Learning Agents Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
2025 |
|
| Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility Journal Article American Society of Agricultural and Biological Engineers, 41 (6), pp. 733-747, 2025. |
| 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. |
| H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking Workshop IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES, 2025. |
| IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction, 2025. |
2024 |
|
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). |
| Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Anchor-oriented Multi-Robot Coverage without Global Localization Workshop IEEE ICRA 2024 Workshop on Sensing and Perception in Extreme Environments (HERMES), 2024, (Spotlight Presentation). |
2023 |
|
| Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. |
| On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning Journal Article Algorithms, 16 (11), pp. 498, 2023. |
| KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. |
| Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. |
| The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). |
2022 |
|
| Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. |
| Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. |
2021 |
|
| 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. |
2019 |
|
| Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments Conference Int. Symp. on Multi Robot Systems (MRS), Rutgers, NJ, USA 2019. |