
2026 |
|
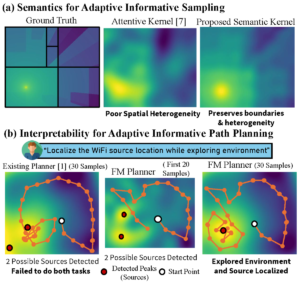 | SK: Semantic Kernel for Robotic Information Gathering Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: autonomy, cooperation, mapping, multi-robot systems @conference{Ghanta2026, title = {SK: Semantic Kernel for Robotic Information Gathering}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://herolab.org/ghanta_iros_2026_semantic_kernel_for_robotic_information_sampling_preprint/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Environmental spatial phenomena exhibit rich semantic and structural relationships, yet most robotic information gathering methods assume stationarity and ignore scene context. Meanwhile, Large Language Models (LLMs) demonstrate strong spatial reasoning capabilities, yet their potential for modeling spatial information remains largely unexplored. We propose a Semantic Kernel (SK) for Gaussian Processes (GPs) that integrates scene semantics into environmental field estimation. Specifically, we leverage an LLM to interpret scene graphs and extract structural relationships, which are then used to construct spatially varying priors, yielding a non-stationary GP that adapts to scene context. To efficiently adapt kernel parameterization from semantics with minimal supervision, we develop a hybrid approach that combines few-shot learning with parameter-efficient fine-tuning, enabling the LLM to learn heterogeneous semantic priors across diverse environments. We evaluate the proposed approach extensively in both simulation and real-world deployments against state-of-the-art baselines. These findings highlight the potential of combining semantic scene reasoning with probabilistic modeling to enable more efficient and reliable robotic information gathering.}, keywords = {autonomy, cooperation, mapping, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } Environmental spatial phenomena exhibit rich semantic and structural relationships, yet most robotic information gathering methods assume stationarity and ignore scene context. Meanwhile, Large Language Models (LLMs) demonstrate strong spatial reasoning capabilities, yet their potential for modeling spatial information remains largely unexplored. We propose a Semantic Kernel (SK) for Gaussian Processes (GPs) that integrates scene semantics into environmental field estimation. Specifically, we leverage an LLM to interpret scene graphs and extract structural relationships, which are then used to construct spatially varying priors, yielding a non-stationary GP that adapts to scene context. To efficiently adapt kernel parameterization from semantics with minimal supervision, we develop a hybrid approach that combines few-shot learning with parameter-efficient fine-tuning, enabling the LLM to learn heterogeneous semantic priors across diverse environments. We evaluate the proposed approach extensively in both simulation and real-world deployments against state-of-the-art baselines. These findings highlight the potential of combining semantic scene reasoning with probabilistic modeling to enable more efficient and reliable robotic information gathering. |
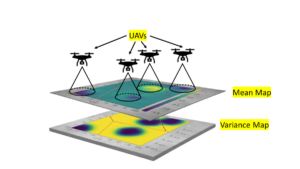 | H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot systems @conference{Nistane2026, title = {H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs}, author = {Swaraj Nistane and Ramviyas Parasuraman}, url = {https://herolab.org/nistane_iros_2026_hipp/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {We present an altitude-adaptive information-gathering framework for multiple unmanned aerial vehicles (UAVs) tasked with mapping an unknown, non-stationary spatial field subject to sensing uncertainties and field-of-view constraints. A critical challenge in such missions is managing the trade-off between sensor coverage (field of view) and measurement fidelity, as higher altitudes expand the spatial footprint at the cost of increased noise and reduced resolution. To address this, we model the environment using a heteroscedastic Gaussian Process (GP) equipped with an Attentive Kernel, which dynamically learns non-stationary spatial correlations and local lengthscales to capture complex environmental features. The proposed framework coordinates multi-UAV exploration through a weighted Voronoi partitioning strategy driven by learned kernel lengthscales, allocating sensing effort in proportion to spatial information density. Sensing actions are selected via a structured two-stage discrete maximization over spatial location and altitude, guided by a multiplicative utility function integrating coverage, expected information gain, and variability-driven exploitation. In addition to field reconstruction, the learned GP hyperparameters are used to extract a semantic variability map, enabling structure-aware region segmentation without supervised labels and supporting downstream heterogeneous robotic deployment. Experimental evaluation on high-resolution elevation-derived fields demonstrates improved reconstruction accuracy and reduced uncertainty compared to fixed-altitude and stationary-kernel baselines.}, keywords = {control, mapping, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } We present an altitude-adaptive information-gathering framework for multiple unmanned aerial vehicles (UAVs) tasked with mapping an unknown, non-stationary spatial field subject to sensing uncertainties and field-of-view constraints. A critical challenge in such missions is managing the trade-off between sensor coverage (field of view) and measurement fidelity, as higher altitudes expand the spatial footprint at the cost of increased noise and reduced resolution. To address this, we model the environment using a heteroscedastic Gaussian Process (GP) equipped with an Attentive Kernel, which dynamically learns non-stationary spatial correlations and local lengthscales to capture complex environmental features. The proposed framework coordinates multi-UAV exploration through a weighted Voronoi partitioning strategy driven by learned kernel lengthscales, allocating sensing effort in proportion to spatial information density. Sensing actions are selected via a structured two-stage discrete maximization over spatial location and altitude, guided by a multiplicative utility function integrating coverage, expected information gain, and variability-driven exploitation. In addition to field reconstruction, the learned GP hyperparameters are used to extract a semantic variability map, enabling structure-aware region segmentation without supervised labels and supporting downstream heterogeneous robotic deployment. Experimental evaluation on high-resolution elevation-derived fields demonstrates improved reconstruction accuracy and reduced uncertainty compared to fixed-altitude and stationary-kernel baselines. |
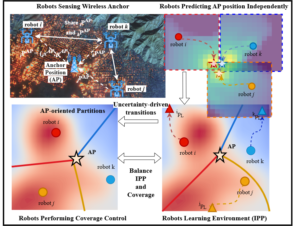 | Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, localization, mapping, multi-robot systems, planning @conference{Munir2026, title = {Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___multi_robot_informative_path_planning_without_global_localization/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage.}, keywords = {control, cooperation, localization, mapping, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage. |
2025 |
|
 | 2025 IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS), 2025. Abstract | Links | BibTeX | Tags: learning, localization, mapping, multi-robot systems, perception @conference{Ghanta2025c, title = {Policies over Poses: Reinforcement Learning based Distributed Pose-Graph Optimization for Multi-Robot SLAM}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11357260}, doi = {10.1109/MRS66243.2025.11357260}, year = {2025}, date = {2025-12-04}, booktitle = {2025 IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS)}, abstract = {We consider the distributed pose-graph optimization (PGO) problem, which is fundamental in accurate trajectory estimation in multi-robot simultaneous localization and mapping (SLAM). Conventional iterative approaches linearize a highly non-convex optimization objective, requiring repeated solving of normal equations, which often converge to local minima and thus produce suboptimal estimates. We propose a scalable, outlier-robust distributed planar PGO framework using Multi-Agent Reinforcement Learning (MARL). We cast distributed PGO as a partially observable Markov game defined on local pose-graphs, where each action refines a single edge's pose estimate. A graph partitioner decomposes the global pose graph, and each robot runs a recurrent edge-conditioned Graph Neural Network (GNN) encoder with adaptive edge-gating to denoise noisy edges. Robots sequentially refine poses through a hybrid policy that utilizes prior action memory and graph embeddings. After local graph correction, a consensus scheme reconciles inter-robot disagreements to produce a globally consistent estimate. Our extensive evaluations on a comprehensive suite of synthetic and real-world datasets demonstrate that our learned MARL-based actors reduce the global objective by an average of 37.5% more than the state-of-the-art distributed PGO framework, while enhancing inference efficiency by at least 6X. We also demonstrate that actor replication allows a single learned policy to scale effortlessly to substantially larger robot teams without any retraining. Code is publicly available at https://github.com/herolab-uga/policies-over-poses }, keywords = {learning, localization, mapping, multi-robot systems, perception}, pubstate = {published}, tppubtype = {conference} } We consider the distributed pose-graph optimization (PGO) problem, which is fundamental in accurate trajectory estimation in multi-robot simultaneous localization and mapping (SLAM). Conventional iterative approaches linearize a highly non-convex optimization objective, requiring repeated solving of normal equations, which often converge to local minima and thus produce suboptimal estimates. We propose a scalable, outlier-robust distributed planar PGO framework using Multi-Agent Reinforcement Learning (MARL). We cast distributed PGO as a partially observable Markov game defined on local pose-graphs, where each action refines a single edge's pose estimate. A graph partitioner decomposes the global pose graph, and each robot runs a recurrent edge-conditioned Graph Neural Network (GNN) encoder with adaptive edge-gating to denoise noisy edges. Robots sequentially refine poses through a hybrid policy that utilizes prior action memory and graph embeddings. After local graph correction, a consensus scheme reconciles inter-robot disagreements to produce a globally consistent estimate. Our extensive evaluations on a comprehensive suite of synthetic and real-world datasets demonstrate that our learned MARL-based actors reduce the global objective by an average of 37.5% more than the state-of-the-art distributed PGO framework, while enhancing inference efficiency by at least 6X. We also demonstrate that actor replication allows a single learned policy to scale effortlessly to substantially larger robot teams without any retraining. Code is publicly available at https://github.com/herolab-uga/policies-over-poses |
 | IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction, 2025. Abstract | Links | BibTeX | Tags: mapping, multi-robot systems, perception, planning @workshop{Ghanta2025d, title = {SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://cearlab.github.io/blockbyblock.github.io/index.html}, year = {2025}, date = {2025-05-19}, booktitle = {IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction}, abstract = {Multi-robot systems hold promise for accelerating cooperative construction tasks such as site preparation and modular assembly. However, dynamic inter-robot occlusions in 3D point-cloud mapping introduce ghosting artifacts that compromise surface reconstruction accuracy and impede downstream planning for grading and leveling. Furthermore, traditional 2D grid-based frontier approaches fail to capture volumetric nuances in partially reconstructed areas, limiting exploration. We propose SPACE, a semi-distributed framework that (1) employs geometric mutual-awareness coupled with image-plane clustering to suppress dynamic robot artifacts, and (2) introduces a bi-variate frontier detection and assignment scheme that classifies and prioritizes both unexplored and weakly mapped regions. SPACE achieves up to 99% reduction in ghosting volume and 95% exploration coverage in ROS-Gazebo experiments and real-world experiments. }, keywords = {mapping, multi-robot systems, perception, planning}, pubstate = {published}, tppubtype = {workshop} } Multi-robot systems hold promise for accelerating cooperative construction tasks such as site preparation and modular assembly. However, dynamic inter-robot occlusions in 3D point-cloud mapping introduce ghosting artifacts that compromise surface reconstruction accuracy and impede downstream planning for grading and leveling. Furthermore, traditional 2D grid-based frontier approaches fail to capture volumetric nuances in partially reconstructed areas, limiting exploration. We propose SPACE, a semi-distributed framework that (1) employs geometric mutual-awareness coupled with image-plane clustering to suppress dynamic robot artifacts, and (2) introduces a bi-variate frontier detection and assignment scheme that classifies and prioritizes both unexplored and weakly mapped regions. SPACE achieves up to 99% reduction in ghosting volume and 95% exploration coverage in ROS-Gazebo experiments and real-world experiments. |
2024 |
|
 | Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. Abstract | Links | BibTeX | Tags: cooperation, learning, mapping, multi-robot, networking @article{Latif2024b, title = {Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10413563}, doi = {10.1109/LRA.2024.3358095}, year = {2024}, date = {2024-03-01}, journal = {IEEE Robotics and Automation Letters}, volume = {9}, number = {3}, pages = {2622 - 2629}, abstract = {Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. }, keywords = {cooperation, learning, mapping, multi-robot, networking}, pubstate = {published}, tppubtype = {article} } Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. |
 | 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: learning, mapping, perception @conference{Ravipati2024, title = {Object-Oriented Material Classification and 3D Clustering for Improved Semantic Perception and Mapping in Mobile Robots}, author = {Siva Krishna Ravipati and Ehsan Latif and Suchendra Bhandarkar and Ramviyas Parasuraman }, url = {https://ieeexplore.ieee.org/document/10801936}, doi = {10.1109/IROS58592.2024.10801936}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {9729-9736}, abstract = {Classification of different object surface material types can play a significant role in the decision-making algorithms for mobile robots and autonomous vehicles. RGB-based scene-level semantic segmentation has been well-addressed in the literature. However, improving material recognition using the depth modality and its integration with SLAM algorithms for 3D semantic mapping could unlock new potential benefits in the robotics perception pipeline. To this end, we propose a complementarity-aware deep learning approach for RGB-D-based material classification built on top of an object-oriented pipeline. The approach further integrates the ORB-SLAM2 method for 3D scene mapping with multiscale clustering of the detected material semantics in the point cloud map generated by the visual SLAM algorithm. Extensive experimental results with existing public datasets and newly contributed real-world robot datasets demonstrate a significant improvement in material classification and 3D clustering accuracy compared to state-of-the-art approaches for 3D semantic scene mapping. }, keywords = {learning, mapping, perception}, pubstate = {published}, tppubtype = {conference} } Classification of different object surface material types can play a significant role in the decision-making algorithms for mobile robots and autonomous vehicles. RGB-based scene-level semantic segmentation has been well-addressed in the literature. However, improving material recognition using the depth modality and its integration with SLAM algorithms for 3D semantic mapping could unlock new potential benefits in the robotics perception pipeline. To this end, we propose a complementarity-aware deep learning approach for RGB-D-based material classification built on top of an object-oriented pipeline. The approach further integrates the ORB-SLAM2 method for 3D scene mapping with multiscale clustering of the detected material semantics in the point cloud map generated by the visual SLAM algorithm. Extensive experimental results with existing public datasets and newly contributed real-world robot datasets demonstrate a significant improvement in material classification and 3D clustering accuracy compared to state-of-the-art approaches for 3D semantic scene mapping. |
2023 |
|
 | Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot, planning @article{Munir2022b, title = {Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1424-8220/23/23/9600}, doi = {10.3390/s23239600}, year = {2023}, date = {2023-12-04}, journal = {Sensors}, volume = {23}, number = {23}, abstract = {Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable.}, keywords = {control, mapping, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable. |
 | SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. Abstract | Links | BibTeX | Tags: cooperation, localization, mapping, multi-robot @conference{Latif2023b, title = {SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10342157}, doi = {10.1109/IROS55552.2023.10342157}, year = {2023}, date = {2023-10-05}, booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)}, organization = {IEEE}, abstract = {The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications.}, keywords = {cooperation, localization, mapping, multi-robot}, pubstate = {published}, tppubtype = {conference} } The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications. |
 | Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. Abstract | Links | BibTeX | Tags: cooperation, mapping, multi-robot, multi-robot systems, networking @conference{Latif2023, title = {Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration}, author = {Ehsan Latif and WenZhan Song and Ramviyas Parasuraman}, doi = {10.1109/INFOCOMWKSHPS57453.2023.10226167}, year = {2023}, date = {2023-05-01}, booktitle = {IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS)}, abstract = {Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios.}, keywords = {cooperation, mapping, multi-robot, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios. |
2020 |
|
 | Material Mapping in Unknown Environments using Tapping Sound Conference 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), 2020. Abstract | BibTeX | Tags: mapping, perception, robotics @conference{Kannan2020, title = {Material Mapping in Unknown Environments using Tapping Sound}, author = {Shyam Sundar Kannan and Wonse Jo and Ramviyas Parasuramanoiuytrewq and Byung-Cheol Min}, year = {2020}, date = {2020-10-29}, booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020)}, abstract = {In this paper, we propose an autonomous exploration and tapping mechanism-based material mapping system for a mobile robot in unknown environments. The proposed system integrates SLAM modules and sound-based material classification to enable a mobile robot to explore an unknown environment autonomously and at the same time identify the various objects and materials in the environment in an efficient manner, creating a material map which localizes the various materials in the environment over the occupancy grid. A tapping mechanism and tapping audio signal processing based on machine learning techniques are exploited for a robot to identify the objects and materials. We demonstrate the proposed system through experiments using a mobile robot platform installed with Velodyne LiDAR, a linear solenoid, and microphones in an exploration-like scenario with various materials. Experiment results demonstrate that the proposed system can create useful material maps in unknown environments.}, keywords = {mapping, perception, robotics}, pubstate = {published}, tppubtype = {conference} } In this paper, we propose an autonomous exploration and tapping mechanism-based material mapping system for a mobile robot in unknown environments. The proposed system integrates SLAM modules and sound-based material classification to enable a mobile robot to explore an unknown environment autonomously and at the same time identify the various objects and materials in the environment in an efficient manner, creating a material map which localizes the various materials in the environment over the occupancy grid. A tapping mechanism and tapping audio signal processing based on machine learning techniques are exploited for a robot to identify the objects and materials. We demonstrate the proposed system through experiments using a mobile robot platform installed with Velodyne LiDAR, a linear solenoid, and microphones in an exploration-like scenario with various materials. Experiment results demonstrate that the proposed system can create useful material maps in unknown environments. |
Publications
2026 |
|
| SK: Semantic Kernel for Robotic Information Gathering Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
2025 |
|
| 2025 IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS), 2025. |
| IEEE ICRA 2025 Workshop on Block by Block Collaborative Strategies for Multi-agent Robotic Construction, 2025. |
2024 |
|
| Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. |
| 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
2023 |
|
| Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. |
| SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. |
| Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. |
2020 |
|
| Material Mapping in Unknown Environments using Tapping Sound Conference 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), 2020. |