
2026 |
|
 | SK: Semantic Kernel for Robotic Information Gathering Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: autonomy, cooperation, mapping, multi-robot systems @conference{Ghanta2026, title = {SK: Semantic Kernel for Robotic Information Gathering}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://herolab.org/ghanta_iros_2026_semantic_kernel_for_robotic_information_sampling_preprint/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Environmental spatial phenomena exhibit rich semantic and structural relationships, yet most robotic information gathering methods assume stationarity and ignore scene context. Meanwhile, Large Language Models (LLMs) demonstrate strong spatial reasoning capabilities, yet their potential for modeling spatial information remains largely unexplored. We propose a Semantic Kernel (SK) for Gaussian Processes (GPs) that integrates scene semantics into environmental field estimation. Specifically, we leverage an LLM to interpret scene graphs and extract structural relationships, which are then used to construct spatially varying priors, yielding a non-stationary GP that adapts to scene context. To efficiently adapt kernel parameterization from semantics with minimal supervision, we develop a hybrid approach that combines few-shot learning with parameter-efficient fine-tuning, enabling the LLM to learn heterogeneous semantic priors across diverse environments. We evaluate the proposed approach extensively in both simulation and real-world deployments against state-of-the-art baselines. These findings highlight the potential of combining semantic scene reasoning with probabilistic modeling to enable more efficient and reliable robotic information gathering.}, keywords = {autonomy, cooperation, mapping, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } Environmental spatial phenomena exhibit rich semantic and structural relationships, yet most robotic information gathering methods assume stationarity and ignore scene context. Meanwhile, Large Language Models (LLMs) demonstrate strong spatial reasoning capabilities, yet their potential for modeling spatial information remains largely unexplored. We propose a Semantic Kernel (SK) for Gaussian Processes (GPs) that integrates scene semantics into environmental field estimation. Specifically, we leverage an LLM to interpret scene graphs and extract structural relationships, which are then used to construct spatially varying priors, yielding a non-stationary GP that adapts to scene context. To efficiently adapt kernel parameterization from semantics with minimal supervision, we develop a hybrid approach that combines few-shot learning with parameter-efficient fine-tuning, enabling the LLM to learn heterogeneous semantic priors across diverse environments. We evaluate the proposed approach extensively in both simulation and real-world deployments against state-of-the-art baselines. These findings highlight the potential of combining semantic scene reasoning with probabilistic modeling to enable more efficient and reliable robotic information gathering. |
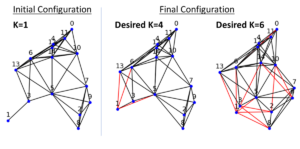 | Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, networking @conference{Sagale2026b, title = {Distributed Connectivity Restoration and Improvement in Networked Robots}, author = {Atharva Sagale and Ramviyas Parasuraman}, url = {https://herolab.org/iros26_sagale_dfcr/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. }, keywords = {control, cooperation, multi-robot systems, networking}, pubstate = {forthcoming}, tppubtype = {conference} } Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. |
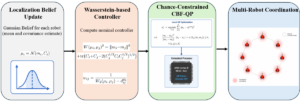 | Multi-Robot Consensus and Coordination with Localization Uncertainty Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot systems @conference{Tasooji2026, title = {Multi-Robot Consensus and Coordination with Localization Uncertainty }, author = {Tohid Kargar Tasooji and Ramviyas Parasuraman}, url = {https://herolab.org/tasooji_iros_2026_wassersteincoordination/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Multi-robot coordination requires robots to share or estimate their relative positions using onboard sensors. However, the uncertainty in these position measurements is typically ignored in consensus-based protocols for rendezvous, formation control, and role assignment, which can degrade performance and safety in realistic environments. This paper presents a Wasserstein-based consensus and formation control framework that explicitly accounts for localization uncertainty by modeling each robot’s position as a Gaussian belief and using the Wasserstein distance in the coordination law. This uncertainty-aware design improves robustness to sensor noise and communication constraints and guarantees exponential convergence to a consensus/formation equilibrium, with a lower bound on the convergence rate expressed in terms of uncertainty bounds and network topology. To ensure safety under uncertain localization, we further integrate a distributed chance-constrained Control Barrier Functions (CBF)–Quadratic Program (QP) layer that uses belief covariances to enforce probabilistic collision avoidance and connectivity preservation while minimally modifying the nominal controller. Extensive simulations and hardware experiments demonstrate that, for both consensus and formation tasks, the proposed framework outperforms traditional Euclidean-distance-based controllers in high-uncertainty scenarios by achieving lower steady-state error while maintaining safe inter-robot distances.}, keywords = {cooperation, localization, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } Multi-robot coordination requires robots to share or estimate their relative positions using onboard sensors. However, the uncertainty in these position measurements is typically ignored in consensus-based protocols for rendezvous, formation control, and role assignment, which can degrade performance and safety in realistic environments. This paper presents a Wasserstein-based consensus and formation control framework that explicitly accounts for localization uncertainty by modeling each robot’s position as a Gaussian belief and using the Wasserstein distance in the coordination law. This uncertainty-aware design improves robustness to sensor noise and communication constraints and guarantees exponential convergence to a consensus/formation equilibrium, with a lower bound on the convergence rate expressed in terms of uncertainty bounds and network topology. To ensure safety under uncertain localization, we further integrate a distributed chance-constrained Control Barrier Functions (CBF)–Quadratic Program (QP) layer that uses belief covariances to enforce probabilistic collision avoidance and connectivity preservation while minimally modifying the nominal controller. Extensive simulations and hardware experiments demonstrate that, for both consensus and formation tasks, the proposed framework outperforms traditional Euclidean-distance-based controllers in high-uncertainty scenarios by achieving lower steady-state error while maintaining safe inter-robot distances. |
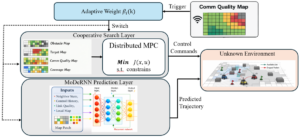 | Hybrid Framework for Multi-Robot Target Search in Unknown and Adversarial Environments Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: cooperation, learning, localization, multi-robot systems @conference{Tasooji2026c, title = {Hybrid Framework for Multi-Robot Target Search in Unknown and Adversarial Environments}, author = {Tohid Kargar Tasooji and Ramviyas Parasuraman}, url = {https://herolab.org/tasooji_iros_2026_hdmpc/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {This paper presents a hybrid framework for multi-robot multi-target search in unknown, cluttered, and adversarial environments with limited sensing and intermittent communication. We employ a unified grid-based map encoding obstacles, coverage, target likelihood, and communication quality, together with a probabilistic adversarial model using layered Gaussian-like danger zones to capture the impact of varying adversary levels. On top of this representation, we develop an adaptive communication-aware, learning-based distributed MPC scheme that uses shared maps for cooperative trajectory planning under strong communication and learned inter-robot interaction models to predict neighbor states and maintain search efficiency when communication degrades, thereby reducing reliance on real-time data exchange. Extensive experiments on diverse maps with static and dynamic targets show that the proposed method reduces communication overhead and search time while improving prediction accuracy and overall resilience across different levels of adversaries. }, keywords = {cooperation, learning, localization, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } This paper presents a hybrid framework for multi-robot multi-target search in unknown, cluttered, and adversarial environments with limited sensing and intermittent communication. We employ a unified grid-based map encoding obstacles, coverage, target likelihood, and communication quality, together with a probabilistic adversarial model using layered Gaussian-like danger zones to capture the impact of varying adversary levels. On top of this representation, we develop an adaptive communication-aware, learning-based distributed MPC scheme that uses shared maps for cooperative trajectory planning under strong communication and learned inter-robot interaction models to predict neighbor states and maintain search efficiency when communication degrades, thereby reducing reliance on real-time data exchange. Extensive experiments on diverse maps with static and dynamic targets show that the proposed method reduces communication overhead and search time while improving prediction accuracy and overall resilience across different levels of adversaries. |
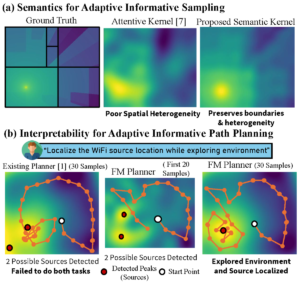
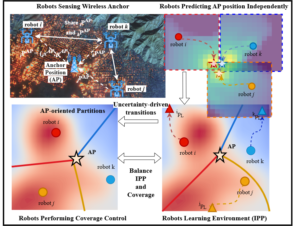 | Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, localization, mapping, multi-robot systems, planning @conference{Munir2026, title = {Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___multi_robot_informative_path_planning_without_global_localization/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage.}, keywords = {control, cooperation, localization, mapping, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage. |
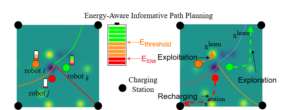 | Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, planning @conference{Munir2026b, title = {Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems}, author = {Aiman Munir and Aryan Dutta and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___energy_aware_ipp/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation.}, keywords = {control, cooperation, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation. |
2025 |
|
 | SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems Journal Article IEEE Robotics and Automation Letters, 10 (12), pp. 13074–13081, 2025. Abstract | Links | BibTeX | Tags: cooperation, multi-robot systems, perception @article{Ghanta2025, title = {SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11222879}, doi = {10.1109/LRA. 2025.3627118}, year = {2025}, date = {2025-12-12}, journal = {IEEE Robotics and Automation Letters}, volume = {10}, number = {12}, pages = {13074–13081}, abstract = {In indoor environments, multi-robot visual (RGB-D) mapping and exploration hold immense potential for application in domains such as domestic service and logistics, where deploying multiple robots in the same environment can significantly enhance efficiency. However, there are two primary challenges: (1) the “ghosting trail” effect, which occurs when inter-robot views overlap, producing temporally inconsistent, duplicated surfaces that degrade point-cloud reconstruction accuracy, and (2) the oversight of visual reconstructions in selecting the most effective frontiers for exploration. Given these challenges are interrelated, we address them together by proposing a new semi-distributed framework (SPACE) for spatial cooperation in indoor environments that enables enhanced coverage and 3D mapping. SPACE leverages geometric techniques, including “mutual awareness” and a “dynamic robot filter,” to overcome spatial mapping constraints. Additionally, we introduce a novel spatial frontier detection system and map merger, integrated with an adaptive frontier assigner for optimal coverage balancing the exploration and reconstruction objectives. In extensive ROS-Gazebo simulations and real-world experiments, SPACE demonstrated superior performance over state-of-the-art approaches in both exploration and mapping metrics, demonstrating significant mitigation of the ghosting effects by multiple magnitudes.}, keywords = {cooperation, multi-robot systems, perception}, pubstate = {published}, tppubtype = {article} } In indoor environments, multi-robot visual (RGB-D) mapping and exploration hold immense potential for application in domains such as domestic service and logistics, where deploying multiple robots in the same environment can significantly enhance efficiency. However, there are two primary challenges: (1) the “ghosting trail” effect, which occurs when inter-robot views overlap, producing temporally inconsistent, duplicated surfaces that degrade point-cloud reconstruction accuracy, and (2) the oversight of visual reconstructions in selecting the most effective frontiers for exploration. Given these challenges are interrelated, we address them together by proposing a new semi-distributed framework (SPACE) for spatial cooperation in indoor environments that enables enhanced coverage and 3D mapping. SPACE leverages geometric techniques, including “mutual awareness” and a “dynamic robot filter,” to overcome spatial mapping constraints. Additionally, we introduce a novel spatial frontier detection system and map merger, integrated with an adaptive frontier assigner for optimal coverage balancing the exploration and reconstruction objectives. In extensive ROS-Gazebo simulations and real-world experiments, SPACE demonstrated superior performance over state-of-the-art approaches in both exploration and mapping metrics, demonstrating significant mitigation of the ghosting effects by multiple magnitudes. |
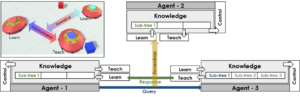 | IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. Abstract | Links | BibTeX | Tags: behavior-trees, cooperation, multi-robot @article{Venkata2025, title = {IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping}, author = {Sanjay Sarma Oruganti Venkata and Ramviyas Parasuraman and Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/document/10976677}, doi = {10.1109/TCYB.2025.3560564}, year = {2025}, date = {2025-04-25}, journal = {IEEE Transactions on Cybernetics}, abstract = {Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication.}, keywords = {behavior-trees, cooperation, multi-robot}, pubstate = {published}, tppubtype = {article} } Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication. |
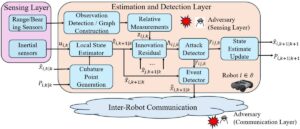 | Distributed Fault-Tolerant Multi-Robot Cooperative Localization in Adversarial Environments Conference 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot systems @conference{Tasooji2025, title = {Distributed Fault-Tolerant Multi-Robot Cooperative Localization in Adversarial Environments}, author = {Tohid Tasooji and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11246042}, doi = {10.1109/IROS60139.2025.11246042}, year = {2025}, date = {2025-10-19}, booktitle = {2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {In multi-robot systems (MRS), cooperative localization is a crucial task for enhancing system robustness and scalability, especially in GPS-denied or communication-limited environments. However, adversarial attacks, such as sensor manipulation, and communication jamming, pose significant challenges to the performance of traditional localization methods. In this paper, we propose a novel distributed fault-tolerant cooperative localization framework to enhance resilience against sensor and communication disruptions in adversarial environments. We introduce an adaptive event-triggered communication strategy that dynamically adjusts communication thresholds based on real-time sensing and communication quality. This strategy ensures optimal performance even in the presence of sensor degradation or communication failure. Furthermore, we conduct a rigorous analysis of the convergence and stability properties of the proposed algorithm, demonstrating its resilience against bounded adversarial zones and maintaining accurate state estimation. Robotarium-based experiment results show that our proposed algorithm significantly outperforms traditional methods in terms of localization accuracy and communication efficiency, particularly in adversarial settings. Our approach offers improved scalability, reliability, and fault tolerance for MRS, making it suitable for large-scale deployments in real-world, challenging environments. }, keywords = {cooperation, localization, multi-robot systems}, pubstate = {published}, tppubtype = {conference} } In multi-robot systems (MRS), cooperative localization is a crucial task for enhancing system robustness and scalability, especially in GPS-denied or communication-limited environments. However, adversarial attacks, such as sensor manipulation, and communication jamming, pose significant challenges to the performance of traditional localization methods. In this paper, we propose a novel distributed fault-tolerant cooperative localization framework to enhance resilience against sensor and communication disruptions in adversarial environments. We introduce an adaptive event-triggered communication strategy that dynamically adjusts communication thresholds based on real-time sensing and communication quality. This strategy ensures optimal performance even in the presence of sensor degradation or communication failure. Furthermore, we conduct a rigorous analysis of the convergence and stability properties of the proposed algorithm, demonstrating its resilience against bounded adversarial zones and maintaining accurate state estimation. Robotarium-based experiment results show that our proposed algorithm significantly outperforms traditional methods in terms of localization accuracy and communication efficiency, particularly in adversarial settings. Our approach offers improved scalability, reliability, and fault tolerance for MRS, making it suitable for large-scale deployments in real-world, challenging environments. |
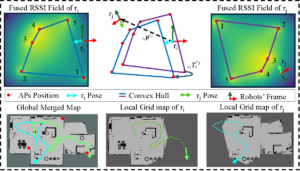 | 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot systems, networking, perception @conference{Ghanta2025b, title = {MGPRL: Distributed Multi-Gaussian Processes for Wi-Fi-based Multi-Robot Relative Localization in Large Indoor Environments}, author = {Sai Krishna Ghanta and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11247180}, doi = {10.1109/IROS60139.2025.11247180}, year = {2025}, date = {2025-10-19}, booktitle = {2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Relative localization is a crucial capability for multi-robot systems operating in GPS-denied environments. Existing approaches for multi-robot relative localization often depend on costly or short-range sensors like cameras and LiDARs. Consequently, these approaches face challenges such as high computational overhead (e.g., map merging) and difficulties in disjoint environments. To address this limitation, this paper introduces MGPRL, a novel distributed framework for multi-robot relative localization using convex-hull of multiple Wi-Fi access points (AP). To accomplish this, we employ co-regionalized multi-output Gaussian Processes for efficient Radio Signal Strength Indicator (RSSI) field prediction and perform uncertainty-aware multi-AP localization, which is further coupled with weighted convex hull-based alignment for robust relative pose estimation. Each robot predicts the RSSI field of the environment by an online scan of APs in its environment, which are utilized for position estimation of multiple APs. To perform relative localization, each robot aligns the convex hull of its predicted AP locations with that of the neighbor robots. This approach is well-suited for devices with limited computational resources and operates solely on widely available Wi-Fi RSSI measurements without necessitating any dedicated pre-calibration or offline fingerprinting. We rigorously evaluate the performance of the proposed MGPRL in ROS simulations and demonstrate it with real-world experiments, comparing it against multiple state-of-the-art approaches. The results showcase that MGPRL outperforms existing methods in terms of localization accuracy and computational efficiency.}, keywords = {cooperation, localization, multi-robot systems, networking, perception}, pubstate = {published}, tppubtype = {conference} } Relative localization is a crucial capability for multi-robot systems operating in GPS-denied environments. Existing approaches for multi-robot relative localization often depend on costly or short-range sensors like cameras and LiDARs. Consequently, these approaches face challenges such as high computational overhead (e.g., map merging) and difficulties in disjoint environments. To address this limitation, this paper introduces MGPRL, a novel distributed framework for multi-robot relative localization using convex-hull of multiple Wi-Fi access points (AP). To accomplish this, we employ co-regionalized multi-output Gaussian Processes for efficient Radio Signal Strength Indicator (RSSI) field prediction and perform uncertainty-aware multi-AP localization, which is further coupled with weighted convex hull-based alignment for robust relative pose estimation. Each robot predicts the RSSI field of the environment by an online scan of APs in its environment, which are utilized for position estimation of multiple APs. To perform relative localization, each robot aligns the convex hull of its predicted AP locations with that of the neighbor robots. This approach is well-suited for devices with limited computational resources and operates solely on widely available Wi-Fi RSSI measurements without necessitating any dedicated pre-calibration or offline fingerprinting. We rigorously evaluate the performance of the proposed MGPRL in ROS simulations and demonstrate it with real-world experiments, comparing it against multiple state-of-the-art approaches. The results showcase that MGPRL outperforms existing methods in terms of localization accuracy and computational efficiency. |
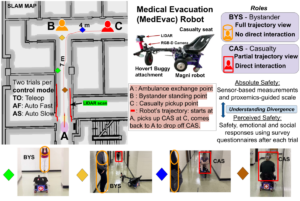 | Integrating Perceptions: A Human-Centered Physical Safety Model for Human-Robot Interaction Conference 2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2025. Abstract | Links | BibTeX | Tags: cooperation, human-robot interaction, navigation, trust @conference{Pandey2025, title = {Integrating Perceptions: A Human-Centered Physical Safety Model for Human-Robot Interaction}, author = {Pranav Kumar Pandey, Ramviyas Parasuraman, and Prashant Doshi}, url = {https://ieeexplore.ieee.org/document/11217747}, doi = {10.1109/RO-MAN63969.2025.11217747}, year = {2025}, date = {2025-08-25}, booktitle = {2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)}, abstract = {Ensuring safety in human-robot interaction (HRI) is essential to foster user trust and enable the broader adoption of robotic systems. Traditional safety models primarily rely on sensor-based measures, such as relative distance and velocity, to assess physical safety. However, these models often fail to capture subjective safety perceptions, which are shaped by individual traits and contextual factors. In this paper, we introduce and analyze a parameterized general safety model that bridges the gap between physical and perceived safety by incorporating a personalization parameter, ρ, into the safety measurement framework to account for individual differences in safety perception. Through a series of hypothesis-driven human-subject studies in a simulated rescue scenario, we investigate how emotional state, trust, and robot behavior influence perceived safety. Our results show that ρ effectively captures meaningful individual differences, driven by affective responses, trust in task consistency, and clustering into distinct user types. Specifically, our findings confirm that predictable and consistent robot behavior as well as the elicitation of positive emotional states, significantly enhance perceived safety. Moreover, responses cluster into a small number of user types, supporting adaptive personalization based on shared safety models. Notably, participant role significantly shapes safety perception, and repeated exposure reduces perceived safety for participants in the casualty role, emphasizing the impact of physical interaction and experiential change. These findings highlight the importance of adaptive, human-centered safety models that integrate both psychological and behavioral dimensions, offering a pathway toward more trustworthy and effective HRI in safety-critical domains. }, keywords = {cooperation, human-robot interaction, navigation, trust}, pubstate = {published}, tppubtype = {conference} } Ensuring safety in human-robot interaction (HRI) is essential to foster user trust and enable the broader adoption of robotic systems. Traditional safety models primarily rely on sensor-based measures, such as relative distance and velocity, to assess physical safety. However, these models often fail to capture subjective safety perceptions, which are shaped by individual traits and contextual factors. In this paper, we introduce and analyze a parameterized general safety model that bridges the gap between physical and perceived safety by incorporating a personalization parameter, ρ, into the safety measurement framework to account for individual differences in safety perception. Through a series of hypothesis-driven human-subject studies in a simulated rescue scenario, we investigate how emotional state, trust, and robot behavior influence perceived safety. Our results show that ρ effectively captures meaningful individual differences, driven by affective responses, trust in task consistency, and clustering into distinct user types. Specifically, our findings confirm that predictable and consistent robot behavior as well as the elicitation of positive emotional states, significantly enhance perceived safety. Moreover, responses cluster into a small number of user types, supporting adaptive personalization based on shared safety models. Notably, participant role significantly shapes safety perception, and repeated exposure reduces perceived safety for participants in the casualty role, emphasizing the impact of physical interaction and experiential change. These findings highlight the importance of adaptive, human-centered safety models that integrate both psychological and behavioral dimensions, offering a pathway toward more trustworthy and effective HRI in safety-critical domains. |
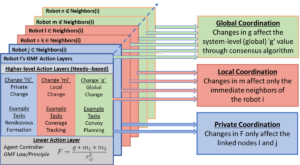 | 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Starks2025, title = {GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems}, author = {Michael Starks and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11128543/}, doi = {10.1109/ICRA55743.2025.11128543}, year = {2025}, date = {2025-05-23}, booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)}, abstract = {Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws.}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws. |
2024 |
|
 | Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. Abstract | Links | BibTeX | Tags: cooperation, learning, mapping, multi-robot, networking @article{Latif2024b, title = {Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10413563}, doi = {10.1109/LRA.2024.3358095}, year = {2024}, date = {2024-03-01}, journal = {IEEE Robotics and Automation Letters}, volume = {9}, number = {3}, pages = {2622 - 2629}, abstract = {Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. }, keywords = {cooperation, learning, mapping, multi-robot, networking}, pubstate = {published}, tppubtype = {article} } Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. |
 | Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, networking @article{Latif2023c, title = {Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10185556}, doi = {10.1109/JIOT.2023.3296334}, year = {2024}, date = {2024-01-15}, journal = {IEEE Internet of Things Journal}, volume = {11}, number = {2}, pages = {2783 - 2795}, abstract = {Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. }, keywords = {cooperation, localization, networking}, pubstate = {published}, tppubtype = {article} } Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Munir2024b, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir and Ayan Dutta and Ramviyas Parasuraman}, url = {https://link.springer.com/chapter/10.1007/978-3-032-04584-3_15}, doi = {10.1007/978-3-032-04584-3_15}, year = {2024}, date = {2024-10-31}, booktitle = {The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {In Press}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot, planning @conference{Munir2024, title = {Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802222}, doi = {10.1109/IROS58592.2024.10802222}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3395-3402}, abstract = {Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. }, keywords = {cooperation, localization, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. |
2023 |
|
 | SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. Abstract | Links | BibTeX | Tags: cooperation, localization, mapping, multi-robot @conference{Latif2023b, title = {SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10342157}, doi = {10.1109/IROS55552.2023.10342157}, year = {2023}, date = {2023-10-05}, booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)}, organization = {IEEE}, abstract = {The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications.}, keywords = {cooperation, localization, mapping, multi-robot}, pubstate = {published}, tppubtype = {conference} } The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications. |
 | Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. Abstract | Links | BibTeX | Tags: cooperation, mapping, multi-robot, multi-robot systems, networking @conference{Latif2023, title = {Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration}, author = {Ehsan Latif and WenZhan Song and Ramviyas Parasuraman}, doi = {10.1109/INFOCOMWKSHPS57453.2023.10226167}, year = {2023}, date = {2023-05-01}, booktitle = {IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS)}, abstract = {Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios.}, keywords = {cooperation, mapping, multi-robot, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios. |
 | The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). Abstract | Links | BibTeX | Tags: cooperation, multi-robot-systems, multiagent-systems, planning @conference{Yang2023, title = {A hierarchical game-theoretic decision-making for cooperative multiagent systems under the presence of adversarial agents}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://acmsac-irmas2023.isr.uc.pt/index.php/track-program}, year = {2023}, date = {2023-03-31}, booktitle = {The 38th ACM/SIGAPP Symposium On Applied Computing}, series = {IRMAS}, abstract = {Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, note = {Oral Presentation. Acceptance Rate: <25%}, keywords = {cooperation, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. Abstract | Links | BibTeX | Tags: autonomy, cooperation, networking @conference{Tahir2023, title = {Mobile Robot Control and Autonomy Through Collaborative Twin}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = { 10.1109/PerComWorkshops56833.2023.10150325}, year = {2023}, date = {2023-03-17}, booktitle = {2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events}, abstract = {When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches.}, keywords = {autonomy, cooperation, networking}, pubstate = {published}, tppubtype = {conference} } When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches. |
 | CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. Abstract | Links | BibTeX | Tags: cooperation, exploration, multi-robot @workshop{Latif2023d, title = {CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://sites.google.com/view/camrs-icra2023/contributed-papers}, year = {2023}, date = {2023-06-02}, booktitle = {ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning}, abstract = {Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication.}, keywords = {cooperation, exploration, multi-robot}, pubstate = {published}, tppubtype = {workshop} } Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication. |
2022 |
|
 | Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. Abstract | Links | BibTeX | Tags: control, cooperation, networking @article{Tahir2022b, title = {Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = {10.1109/TSMC.2022.3216206}, issn = {2168-2232}, year = {2022}, date = {2022-12-01}, journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes.}, keywords = {control, cooperation, networking}, pubstate = {published}, tppubtype = {article} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes. |
 | A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. Abstract | Links | BibTeX | Tags: cooperation, multiagent-systems, planning @workshop{Yang2022b, title = {A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dcslgatech.github.io/iros22-multi-agent-workshop/#section-program https://dcslgatech.github.io/iros22-multi-agent-workshop/contributed_papers/IROS22-DMMAS_paper_6456.pdf https://dcslgatech.github.io/iros22-multi-agent-workshop/posters/DMMAS_6456.pdf}, year = {2022}, date = {2022-10-27}, booktitle = {IROS 2022 Workshop on Decision Making in Multi-Agent Systems}, abstract = {Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {cooperation, multiagent-systems, planning}, pubstate = {published}, tppubtype = {workshop} } Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
2019 |
|
 | Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments Conference Int. Symp. on Multi Robot Systems (MRS), Rutgers, NJ, USA 2019. Abstract | BibTeX | Tags: cooperation, multi-robot systems, planning @conference{Yang2019, title = {Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments}, author = {Qin Yang and Zhiwei Luo and Wenzhan Song and Ramviyas Parasuraman}, year = {2019}, date = {2019-08-22}, booktitle = {Int. Symp. on Multi Robot Systems (MRS)}, organization = {Rutgers, NJ, USA}, abstract = {Multi-Robot Systems and Swarms are intelligent systems in which a large number of agents are coordinated in a distributed and decentralized way. Each robot may have homogeneous or heterogeneous capabilities and can be programmed with several fundamental control laws adapting to the environment. Through different kinds of relationships built using the communication protocols, they present various behaviors based on the shared information and current state. To adapt to dynamic environments effectively, and maximize the utility of the group, robots need to cooperate, share their local information, and make a suitable plan according to the specific scenario. In this paper, we formalize the problem of multi-robots fulfilling dynamic tasks using state transitions represented through a Behavior Tree. We design a framework with corresponding distributed algorithms for communications between robots and negotiation and agreement protocols through a novel priority mechanism. Finally, we evaluate our framework through simulation experiments.}, keywords = {cooperation, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems and Swarms are intelligent systems in which a large number of agents are coordinated in a distributed and decentralized way. Each robot may have homogeneous or heterogeneous capabilities and can be programmed with several fundamental control laws adapting to the environment. Through different kinds of relationships built using the communication protocols, they present various behaviors based on the shared information and current state. To adapt to dynamic environments effectively, and maximize the utility of the group, robots need to cooperate, share their local information, and make a suitable plan according to the specific scenario. In this paper, we formalize the problem of multi-robots fulfilling dynamic tasks using state transitions represented through a Behavior Tree. We design a framework with corresponding distributed algorithms for communications between robots and negotiation and agreement protocols through a novel priority mechanism. Finally, we evaluate our framework through simulation experiments. |
Publications
2026 |
|
| SK: Semantic Kernel for Robotic Information Gathering Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Multi-Robot Consensus and Coordination with Localization Uncertainty Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Hybrid Framework for Multi-Robot Target Search in Unknown and Adversarial Environments Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
| Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
2025 |
|
| SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems Journal Article IEEE Robotics and Automation Letters, 10 (12), pp. 13074–13081, 2025. |
| IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. |
| Distributed Fault-Tolerant Multi-Robot Cooperative Localization in Adversarial Environments Conference 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. |
| 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. |
| Integrating Perceptions: A Human-Centered Physical Safety Model for Human-Robot Interaction Conference 2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2025. |
| 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. |
2024 |
|
| Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. |
| Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). |
| Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
2023 |
|
| SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. |
| Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. |
| The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). |
| Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. |
| CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. |
2022 |
|
| Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. |
| A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. |
2019 |
|
| Self-Reactive Planning of Multi-Robots with Dynamic Task Assignments Conference Int. Symp. on Multi Robot Systems (MRS), Rutgers, NJ, USA 2019. |