
2026 |
|
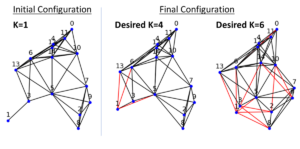 | Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, networking @conference{Sagale2026b, title = {Distributed Connectivity Restoration and Improvement in Networked Robots}, author = {Atharva Sagale and Ramviyas Parasuraman}, url = {https://herolab.org/iros26_sagale_dfcr/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. }, keywords = {control, cooperation, multi-robot systems, networking}, pubstate = {forthcoming}, tppubtype = {conference} } Multi-robot coordination requires maintaining network connectivity, especially in critical operations such as search and rescue, where network robustness is paramount. In this paper, we study the Fast k-connectivity Restoration problem (FCR), which aims to minimize the maximum distance required to restore connectivity. Recent works have proposed scalable solutions, but they rely on a centralized architecture or a learning-based solution to transfer the observable policies from centralized to distributed variants. However, computing node connectivity in a distributed setting is challenging, and performing such operations in a deterministic, algorithmic manner is critical for generalizability and persistent deployment in diverse, unknown environments. We propose a distributed control approach for improving and restoring connectivity. Using local neighborhood interactions and information, our algorithm improves the degrees of individual robots by augmenting 1-hop edges based on their distances, achieving the desired level of node connectivity and yielding comparable performance to achieve sparse connectivity improvements and up to 58% reduction in movements required to achieve dense connectivity over the state-of-the-art algorithms. |
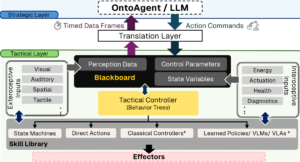 | Why Cognitive Robotics Matters: Lessons from OntoAgent and LLM Deployment in HARMONIC for Safety-Critical Robot Teaming Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: autonomy, behavior-trees, control, human-robot interaction, human-robot interface @conference{Oruganti2026, title = {Why Cognitive Robotics Matters: Lessons from OntoAgent and LLM Deployment in HARMONIC for Safety-Critical Robot Teaming }, author = {Sanjay Oruganti, Sergei Nirenburg, Marjorie McShane, Jesse English, Michael Roberts, Christian Arndt, Ramviyas Parasuraman, Luis Sentis }, url = {https://rpi-leia.github.io/WhyCognitiveRobotics/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {Deploying embodied AI agents in the physical world demands cognitive capabilities for long-horizon planning that execute reliably, deterministically, and transparently. We present HARMONIC, a cognitive-robotic architecture that pairs OntoAgent, a content-centric cognitive architecture providing metacognitive self-monitoring, domain-grounded diagnosis, and consequence-based action selection over ontologically structured knowledge, with a modular reactive tactical layer. HARMONIC's modular design enables a functional evaluation of whether LLMs can replicate OntoAgent's cognitive capabilities, evaluated within the same robotic system under identical conditions. Six LLMs spanning frontier and efficient tiers replace OntoAgent in a collaborative maintenance scenario under native and knowledge-equalized conditions. Results reveal that LLMs do not consistently assess their own knowledge state before acting, causing downstream failures in diagnostic reasoning and action selection. These deficits persist even with equivalent procedural knowledge, indicating the issues are architectural rather than knowledge-based. These findings support the design of physically embodied systems in which cognitive architectures retain primary authority for reasoning, owing to their deterministic and transparent characteristics.}, keywords = {autonomy, behavior-trees, control, human-robot interaction, human-robot interface}, pubstate = {forthcoming}, tppubtype = {conference} } Deploying embodied AI agents in the physical world demands cognitive capabilities for long-horizon planning that execute reliably, deterministically, and transparently. We present HARMONIC, a cognitive-robotic architecture that pairs OntoAgent, a content-centric cognitive architecture providing metacognitive self-monitoring, domain-grounded diagnosis, and consequence-based action selection over ontologically structured knowledge, with a modular reactive tactical layer. HARMONIC's modular design enables a functional evaluation of whether LLMs can replicate OntoAgent's cognitive capabilities, evaluated within the same robotic system under identical conditions. Six LLMs spanning frontier and efficient tiers replace OntoAgent in a collaborative maintenance scenario under native and knowledge-equalized conditions. Results reveal that LLMs do not consistently assess their own knowledge state before acting, causing downstream failures in diagnostic reasoning and action selection. These deficits persist even with equivalent procedural knowledge, indicating the issues are architectural rather than knowledge-based. These findings support the design of physically embodied systems in which cognitive architectures retain primary authority for reasoning, owing to their deterministic and transparent characteristics. |
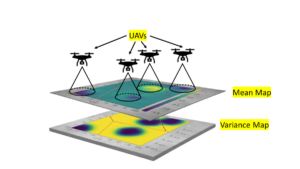 | H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot systems @conference{Nistane2026, title = {H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs}, author = {Swaraj Nistane and Ramviyas Parasuraman}, url = {https://herolab.org/nistane_iros_2026_hipp/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {We present an altitude-adaptive information-gathering framework for multiple unmanned aerial vehicles (UAVs) tasked with mapping an unknown, non-stationary spatial field subject to sensing uncertainties and field-of-view constraints. A critical challenge in such missions is managing the trade-off between sensor coverage (field of view) and measurement fidelity, as higher altitudes expand the spatial footprint at the cost of increased noise and reduced resolution. To address this, we model the environment using a heteroscedastic Gaussian Process (GP) equipped with an Attentive Kernel, which dynamically learns non-stationary spatial correlations and local lengthscales to capture complex environmental features. The proposed framework coordinates multi-UAV exploration through a weighted Voronoi partitioning strategy driven by learned kernel lengthscales, allocating sensing effort in proportion to spatial information density. Sensing actions are selected via a structured two-stage discrete maximization over spatial location and altitude, guided by a multiplicative utility function integrating coverage, expected information gain, and variability-driven exploitation. In addition to field reconstruction, the learned GP hyperparameters are used to extract a semantic variability map, enabling structure-aware region segmentation without supervised labels and supporting downstream heterogeneous robotic deployment. Experimental evaluation on high-resolution elevation-derived fields demonstrates improved reconstruction accuracy and reduced uncertainty compared to fixed-altitude and stationary-kernel baselines.}, keywords = {control, mapping, multi-robot systems}, pubstate = {forthcoming}, tppubtype = {conference} } We present an altitude-adaptive information-gathering framework for multiple unmanned aerial vehicles (UAVs) tasked with mapping an unknown, non-stationary spatial field subject to sensing uncertainties and field-of-view constraints. A critical challenge in such missions is managing the trade-off between sensor coverage (field of view) and measurement fidelity, as higher altitudes expand the spatial footprint at the cost of increased noise and reduced resolution. To address this, we model the environment using a heteroscedastic Gaussian Process (GP) equipped with an Attentive Kernel, which dynamically learns non-stationary spatial correlations and local lengthscales to capture complex environmental features. The proposed framework coordinates multi-UAV exploration through a weighted Voronoi partitioning strategy driven by learned kernel lengthscales, allocating sensing effort in proportion to spatial information density. Sensing actions are selected via a structured two-stage discrete maximization over spatial location and altitude, guided by a multiplicative utility function integrating coverage, expected information gain, and variability-driven exploitation. In addition to field reconstruction, the learned GP hyperparameters are used to extract a semantic variability map, enabling structure-aware region segmentation without supervised labels and supporting downstream heterogeneous robotic deployment. Experimental evaluation on high-resolution elevation-derived fields demonstrates improved reconstruction accuracy and reduced uncertainty compared to fixed-altitude and stationary-kernel baselines. |
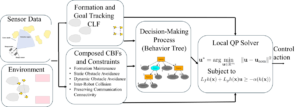 | Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. Abstract | Links | BibTeX | Tags: control, multi-robot @conference{Tasooji2026b, title = {Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles}, author = {Tohid Kargar Tasooji and Ramviyas Parasuraman}, url = {https://herolab.org/tasooji_iros_2026_cbf_qp/}, year = {2026}, date = {2026-09-27}, booktitle = {2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, abstract = {This paper introduces a decentralized control framework for safe and adaptive multi-robot formation in dynamic and uncertain environments. The proposed approach formulates a generalized quadratic program (QP) that integrates multiple Control Barrier Functions (CBFs) for safety, connectivity preservation, and obstacle avoidance with a Control Lyapunov Function (CLF) for goal convergence. To resolve inherent conflicts among these objectives, we present the first integration of behavior trees with CBF–CLF–QP control, providing a structured and modular mechanism for prioritized switching across safety, connectivity, formation, and goal-reaching tasks without deadlock. The proposed framework is fully decentralized, computationally efficient, and scalable, with each agent solving a local QP in sub-second cycles, making it practical for real-time, on-board implementation. Extensive simulations and experiments in cluttered, dynamic environments with moving obstacles and uncertain obstacle geometries demonstrate the method’s ability to ensure safety, maintain network connectivity, and achieve resilient formation control while adapting to rapidly changing conditions. }, keywords = {control, multi-robot}, pubstate = {forthcoming}, tppubtype = {conference} } This paper introduces a decentralized control framework for safe and adaptive multi-robot formation in dynamic and uncertain environments. The proposed approach formulates a generalized quadratic program (QP) that integrates multiple Control Barrier Functions (CBFs) for safety, connectivity preservation, and obstacle avoidance with a Control Lyapunov Function (CLF) for goal convergence. To resolve inherent conflicts among these objectives, we present the first integration of behavior trees with CBF–CLF–QP control, providing a structured and modular mechanism for prioritized switching across safety, connectivity, formation, and goal-reaching tasks without deadlock. The proposed framework is fully decentralized, computationally efficient, and scalable, with each agent solving a local QP in sub-second cycles, making it practical for real-time, on-board implementation. Extensive simulations and experiments in cluttered, dynamic environments with moving obstacles and uncertain obstacle geometries demonstrate the method’s ability to ensure safety, maintain network connectivity, and achieve resilient formation control while adapting to rapidly changing conditions. |
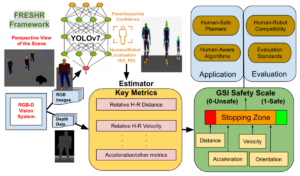 | 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, evaluation, human-robot interaction @conference{Pandey2026, title = {FRESHR-GSI: A Generalized Safety Model and Evaluation Framework for Mobile Robots in Multi-Human Environments}, author = {Pranav Pandey and Ramviyas Parasuraman and Prashant Doshi}, url = {https://arxiv.org/abs/2501.03467}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Human safety is critical in applications involving close human-robot interactions (HRI) and is a key aspect of physical compatibility between humans and robots. While measures of human safety in HRI exist, these mainly target industrial settings involving robotic manipulators. Less attention has been paid to settings where mobile robots and humans share the space. This paper introduces a new robot-centered directional framework of human safety. It is particularly useful for evaluating mobile robots as they operate in environments populated by multiple humans. The framework integrates several key metrics, such as each human’s relative distance, speed, and orientation. The core novelty lies in the framework’s flexibility to accommodate different application requirements while allowing for both the robot-centered and external observer points of view. We instantiate the framework by using RGB-D based vision integrated with a deep learning-based human detection pipeline to yield a proxemics-guided generalized safety index (GSI) that instantaneously assesses human safety. We extensively validate GSI’s capability of producing appropriate and fine-grained safety measures in real-world experimental scenarios and demonstrate its superior efficacy against extant safety models.}, keywords = {control, evaluation, human-robot interaction}, pubstate = {published}, tppubtype = {conference} } Human safety is critical in applications involving close human-robot interactions (HRI) and is a key aspect of physical compatibility between humans and robots. While measures of human safety in HRI exist, these mainly target industrial settings involving robotic manipulators. Less attention has been paid to settings where mobile robots and humans share the space. This paper introduces a new robot-centered directional framework of human safety. It is particularly useful for evaluating mobile robots as they operate in environments populated by multiple humans. The framework integrates several key metrics, such as each human’s relative distance, speed, and orientation. The core novelty lies in the framework’s flexibility to accommodate different application requirements while allowing for both the robot-centered and external observer points of view. We instantiate the framework by using RGB-D based vision integrated with a deep learning-based human detection pipeline to yield a proxemics-guided generalized safety index (GSI) that instantaneously assesses human safety. We extensively validate GSI’s capability of producing appropriate and fine-grained safety measures in real-world experimental scenarios and demonstrate its superior efficacy against extant safety models. |
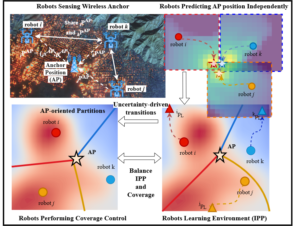 | Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, localization, mapping, multi-robot systems, planning @conference{Munir2026, title = {Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___multi_robot_informative_path_planning_without_global_localization/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage.}, keywords = {control, cooperation, localization, mapping, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Multi-Robot Systems (MRS) in GPS-denied environments such as indoor spaces, subterranean areas, and urban canyons face the dual challenge of localizing themselves while performing informative path planning (IPP) to model unknown spatial fields. Current IPP methods rely heavily on GPS for localization, limiting their applicability in GPS-denied settings, while existing approaches addressing observation uncertainty fail to account for localization uncertainty that degrades mapping accuracy. This paper presents Anchor-Oriented IPP (AO-IPP), a framework that coordinates robot teams through relative positioning using Access Points and uncertainty-driven transitions between three phases: anchor point localization, informative sampling for field estimation, and spatial coverage optimization. Each robot maintains dual Gaussian Process models with transitions driven by uncertainty levels rather than fixed time schedules. Extensive simulations and real-world experiments demonstrate that AO-IPP achieves performance comparable to GPS-based IPP algorithms while outperforming existing methods in balancing IPP and coverage objectives by up to 54%. The approach exhibits sublinear regret bounds and enables autonomous coordination in challenging environments previously inaccessible to traditional IPP methods, providing a robust solution for environmental monitoring, exploration, and mapping applications requiring both accurate field estimation and comprehensive spatial coverage. |
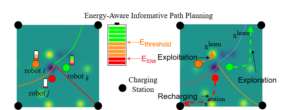 | Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot systems, planning @conference{Munir2026b, title = {Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems}, author = {Aiman Munir and Aryan Dutta and Ramviyas Parasuraman}, url = {https://herolab.org/munir___icra_2026___energy_aware_ipp/}, year = {2026}, date = {2026-06-01}, booktitle = {2026 IEEE International Conference on Robotics & Automation (ICRA)}, abstract = {Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation.}, keywords = {control, cooperation, multi-robot systems, planning}, pubstate = {published}, tppubtype = {conference} } Effective energy management is essential for maximizing information gathering tasks with networked mobile robots, particularly for large-scale, energy-intensive tasks such as agricultural monitoring and wildfire mapping. This paper presents a novel framework that integrates robots’ energy profiles with confidence bounds of their assigned regions to optimize sampling targets. Designed for persistent, long-term deployments, the framework employs Gaussian Process Regression (GPR) to maximize data acquisition and accurately reconstruct unknown spatial distributions (e.g., algae outbreaks or humidity maps). The method enables seamless transitions between exploration (mapping uncertain regions when energy is high), exploitation (refining maps at moderate energy levels), and recharging (navigating to charging stations when energy is low), to achieve energy-balanced informative path planning. Experiments demonstrate the effectiveness of the approach against state-of-the-art methods in generating energy-efficient and distinct paths for heterogeneous robots, delivering up to 32% energy savings while maintaining high reconstruction accuracy. Hardware experiments closely matched the performance in simulation. |
2025 |
|
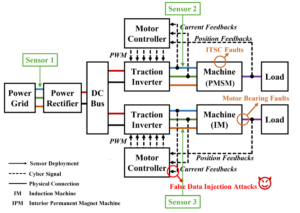
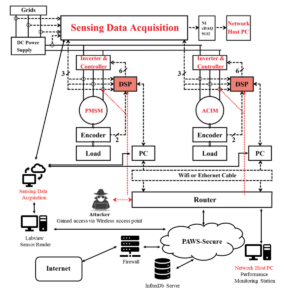 | Real-World Cyber Security Demonstration for Networked Electric Drives Journal Article IEEE Journal of Emerging and Selected Topics in Power Electronics, 13 (4), 2025. Abstract | Links | BibTeX | Tags: control, networking, trust @article{Yang2025, title = {Real-World Cyber Security Demonstration for Networked Electric Drives}, author = {He Yang and Bowen Yang and Stephen Coshatt and Qi Li and Kun Hu and Bryan Cooper Hammond and Jin Ye and Ramviyas Parasuraman and Wenzhan Song}, url = {https://ieeexplore.ieee.org/document/10924153}, year = {2025}, date = {2025-08-01}, journal = {IEEE Journal of Emerging and Selected Topics in Power Electronics}, volume = {13}, number = {4}, abstract = {In this article, we present the design and implementation of a cyber-physical security testbed for networked electric drive systems, aimed at conducting real-world security demonstrations. To our knowledge, this is one of the first security testbeds for networked electric drives, seamlessly integrating the domains of power electronics and computer science, and cybersecurity. By doing so, the testbed offers a comprehensive platform to explore and understand the intricate and often complex interactions between cyber and physical systems. The core of our testbed consists of four electric machine drives, meticulously configured to emulate small-scale but realistic information technology (IT) and operational technology (OT) networks. This setup both provides a controlled environment for simulating a wide array of cyber-attacks, and mirrors potential real-world attack scenarios with a high degree of fidelity. The testbed serves as an invaluable resource for the study of cyber-physical security, offering a practical and dynamic platform for testing and validating cybersecurity measures in the context of networked electric drive systems. As a concrete example of the testbed’s capabilities, we have developed and implemented a Python-based script designed to execute step-stone attacks over a wireless local area network (WLAN). This script leverages a sequence of target IP addresses, simulating a real-world attack vector that could be exploited by adversaries. To counteract such threats, we demonstrate the efficacy of our developed cyber-attack detection algorithms, which are integral to our testbed’s security framework. Furthermore, the testbed incorporates a real-time visualization system using InfluxDB and Grafana, providing a dynamic and interactive representation of networked electric drives and their associated security monitoring mechanisms. This visualization component not only enhances the testbed’s usability but also offers insightful, real-time data for researchers and practitioners, thereby facilitating a deeper understanding of cyber-physical security dynamics in networked electric drive systems.}, keywords = {control, networking, trust}, pubstate = {published}, tppubtype = {article} } In this article, we present the design and implementation of a cyber-physical security testbed for networked electric drive systems, aimed at conducting real-world security demonstrations. To our knowledge, this is one of the first security testbeds for networked electric drives, seamlessly integrating the domains of power electronics and computer science, and cybersecurity. By doing so, the testbed offers a comprehensive platform to explore and understand the intricate and often complex interactions between cyber and physical systems. The core of our testbed consists of four electric machine drives, meticulously configured to emulate small-scale but realistic information technology (IT) and operational technology (OT) networks. This setup both provides a controlled environment for simulating a wide array of cyber-attacks, and mirrors potential real-world attack scenarios with a high degree of fidelity. The testbed serves as an invaluable resource for the study of cyber-physical security, offering a practical and dynamic platform for testing and validating cybersecurity measures in the context of networked electric drive systems. As a concrete example of the testbed’s capabilities, we have developed and implemented a Python-based script designed to execute step-stone attacks over a wireless local area network (WLAN). This script leverages a sequence of target IP addresses, simulating a real-world attack vector that could be exploited by adversaries. To counteract such threats, we demonstrate the efficacy of our developed cyber-attack detection algorithms, which are integral to our testbed’s security framework. Furthermore, the testbed incorporates a real-time visualization system using InfluxDB and Grafana, providing a dynamic and interactive representation of networked electric drives and their associated security monitoring mechanisms. This visualization component not only enhances the testbed’s usability but also offers insightful, real-time data for researchers and practitioners, thereby facilitating a deeper understanding of cyber-physical security dynamics in networked electric drive systems. |
 | Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. Abstract | Links | BibTeX | Tags: control, networking @article{Wu2024, title = {Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation}, author = {Wu, Shushan and Yang, Bowen and Yang, He and Coshatt, Stephen J. and Gong, Xilin and Parasuraman, Ramviyas Nattanmai and Conrad, Justin and Perdisci, Roberto and Zhong, Wenxuan and Ye, Jin and Ma, Ping and Song, WenZhan}, url = {https://ieeexplore.ieee.org/abstract/document/10769069}, doi = {10.1109/JIOT.2024.3476268}, year = {2025}, date = {2025-03-15}, journal = {IEEE Internet of Things Journal}, volume = {12}, number = {6}, pages = {6457-646}, abstract = {The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. }, keywords = {control, networking}, pubstate = {published}, tppubtype = {article} } The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. |
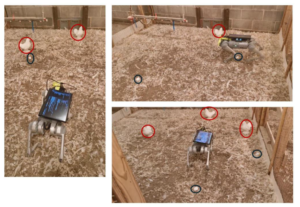 | Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility Journal Article American Society of Agricultural and Biological Engineers, 41 (6), pp. 733-747, 2025. Abstract | Links | BibTeX | Tags: autonomy, control, navigation, perception, planning @article{Mandiga2025, title = {Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility}, author = {Aravind Mandiga, Guoming Li, Tianming Liu, Ramviyas Parasuraman, Ramana M Pidaparti, Venkat UC Bodempudi, and Samuel E Aggrey}, url = {https://elibrary.asabe.org/abstract.asp?AID=55713}, doi = {10.13031/aea.16384}, year = {2025}, date = {2025-01-01}, journal = {American Society of Agricultural and Biological Engineers}, volume = {41}, number = {6}, pages = {733-747}, abstract = { Floor eggs (i.e., eggs laid on the litter floor) are a major problem in cage-free hen systems and account for approximately 5% to 6% of daily egg production. Floor eggs may be contaminated and pecked by birds, which can induce egg eating, degradation of egg quality, and risk of additional floor eggs if not collected in a timely manner. Currently, floor eggs require time-consuming manual collection in daily flock inspection. The objective was to develop autonomous navigation for a quadruped robot to approach floor eggs and to evaluate commercial feasibility through optimized routing strategies. The robot was equipped with an RGB-Depth camera for object detection and depth estimation, and multiple deep learning object detection models were evaluated. Mathematical operations associated with imagery coordinates are converted to real-world trajectories for robot movement controls. The robot was tested at speeds of 0.27, 0.34, 0.41, 0.52, and 0.68 m/s to approach floor eggs. Results show the model successfully localizes floor eggs and hens with over 95% precision, recall, and mAP50(B). The robot approaches floor eggs with an average accuracy of 90%. Commercial feasibility was assessed through mathematical optimization analysis using boustrophedon cellular decomposition for two payload scenarios (50 and 77 eggs) in a typical 50,000-hen facility (380 x 18.2 m). Optimization analysis demonstrated operational viability with total daily travel distances of 10.7 km (50-egg payload) and 7.8 km (77-egg payload) for seven daily charge cycles, successfully transferring 2,000 floor eggs to the conveyor belts. These findings show great potential for quadruped robot navigation and commercial implementation for floor egg collection.}, keywords = {autonomy, control, navigation, perception, planning}, pubstate = {published}, tppubtype = {article} } Floor eggs (i.e., eggs laid on the litter floor) are a major problem in cage-free hen systems and account for approximately 5% to 6% of daily egg production. Floor eggs may be contaminated and pecked by birds, which can induce egg eating, degradation of egg quality, and risk of additional floor eggs if not collected in a timely manner. Currently, floor eggs require time-consuming manual collection in daily flock inspection. The objective was to develop autonomous navigation for a quadruped robot to approach floor eggs and to evaluate commercial feasibility through optimized routing strategies. The robot was equipped with an RGB-Depth camera for object detection and depth estimation, and multiple deep learning object detection models were evaluated. Mathematical operations associated with imagery coordinates are converted to real-world trajectories for robot movement controls. The robot was tested at speeds of 0.27, 0.34, 0.41, 0.52, and 0.68 m/s to approach floor eggs. Results show the model successfully localizes floor eggs and hens with over 95% precision, recall, and mAP50(B). The robot approaches floor eggs with an average accuracy of 90%. Commercial feasibility was assessed through mathematical optimization analysis using boustrophedon cellular decomposition for two payload scenarios (50 and 77 eggs) in a typical 50,000-hen facility (380 x 18.2 m). Optimization analysis demonstrated operational viability with total daily travel distances of 10.7 km (50-egg payload) and 7.8 km (77-egg payload) for seven daily charge cycles, successfully transferring 2,000 floor eggs to the conveyor belts. These findings show great potential for quadruped robot navigation and commercial implementation for floor egg collection. |
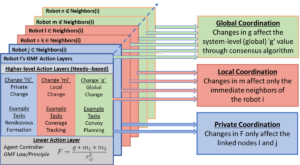 | 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Starks2025, title = {GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems}, author = {Michael Starks and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/11128543/}, doi = {10.1109/ICRA55743.2025.11128543}, year = {2025}, date = {2025-05-23}, booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)}, abstract = {Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws.}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws. |
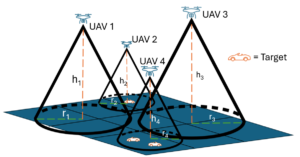 | H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking Workshop IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES, 2025. Abstract | Links | BibTeX | Tags: autonomy, control, multi-robot systems, planning @workshop{Nistane2025, title = {H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking}, author = {Swaraj Nistane, Tohid Tasooji, and Ramviyas Parasuraman}, url = {https://aerial-robotics-workshop-icra.com/wp-content/uploads/2025/05/Poster14.pdf}, year = {2025}, date = {2025-05-19}, booktitle = {IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES}, abstract = {This paper presents a distributed multi-target coverage control framework for multiple unmanned aerial vehicle (UAV) systems that integrates Voronoi-based coverage control with altitude optimization. The proposed method enables robots to adjust their positions and altitudes dynamically to optimize sensing performance across varying target distributions. The framework effectively balances trade-offs between detection costs and coverage area by determining the optimal position and altitude for each robot. This allows the system to adapt to different environmental conditions and target densities, ensuring optimal performance in various scenarios. In the proposed framework, robots descend to lower altitudes in high-density target regions to improve detection accuracy, while in sparse regions, they ascend to maximize coverage. A minimum altitude constraint is obtained to maintain precise tracking in dense areas, ensuring that robots do not operate at excessively low altitudes. The approach guarantees complete coverage of the target space by guiding robots toward the weighted centroids of their respective Voronoi cells, thereby ensuring efficient task allocation and spatial distribution. Simulation experiments demonstrate the effectiveness of the proposed framework in improving tracking accuracy and coverage efficiency in different environments. The results validate the capability of the framework to handle real-time, multi-target tracking and sensor coverage in complex target distributions.}, keywords = {autonomy, control, multi-robot systems, planning}, pubstate = {published}, tppubtype = {workshop} } This paper presents a distributed multi-target coverage control framework for multiple unmanned aerial vehicle (UAV) systems that integrates Voronoi-based coverage control with altitude optimization. The proposed method enables robots to adjust their positions and altitudes dynamically to optimize sensing performance across varying target distributions. The framework effectively balances trade-offs between detection costs and coverage area by determining the optimal position and altitude for each robot. This allows the system to adapt to different environmental conditions and target densities, ensuring optimal performance in various scenarios. In the proposed framework, robots descend to lower altitudes in high-density target regions to improve detection accuracy, while in sparse regions, they ascend to maximize coverage. A minimum altitude constraint is obtained to maintain precise tracking in dense areas, ensuring that robots do not operate at excessively low altitudes. The approach guarantees complete coverage of the target space by guiding robots toward the weighted centroids of their respective Voronoi cells, thereby ensuring efficient task allocation and spatial distribution. Simulation experiments demonstrate the effectiveness of the proposed framework in improving tracking accuracy and coverage efficiency in different environments. The results validate the capability of the framework to handle real-time, multi-target tracking and sensor coverage in complex target distributions. |
2024 |
|
 | Bayesian Strategy Networks Based Soft Actor-Critic Learning Journal Article ACM Transactions on Intelligent Systems and Technology, 15 (3), pp. 1–24, 2024. Abstract | Links | BibTeX | Tags: control, learning @article{Yang2024b, title = {Bayesian Strategy Networks Based Soft Actor-Critic Learning}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dl.acm.org/doi/10.1145/3643862}, doi = {10.1145/3643862}, year = {2024}, date = {2024-03-29}, journal = {ACM Transactions on Intelligent Systems and Technology}, volume = {15}, number = {3}, pages = {1–24}, abstract = {A strategy refers to the rules that the agent chooses the available actions to achieve goals. Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system’s utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. Our method achieves the state-of-the-art performance on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. Furthermore, we extend the topic to the Multi-Agent systems (MAS), discussing the potential research fields and directions.}, keywords = {control, learning}, pubstate = {published}, tppubtype = {article} } A strategy refers to the rules that the agent chooses the available actions to achieve goals. Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system’s utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. Our method achieves the state-of-the-art performance on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. Furthermore, we extend the topic to the Multi-Agent systems (MAS), discussing the potential research fields and directions. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). Abstract | Links | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Munir2024b, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir and Ayan Dutta and Ramviyas Parasuraman}, url = {https://link.springer.com/chapter/10.1007/978-3-032-04584-3_15}, doi = {10.1007/978-3-032-04584-3_15}, year = {2024}, date = {2024-10-31}, booktitle = {The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {In Press}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
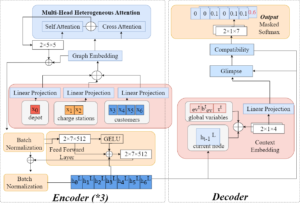 | Route Planning for Electric Vehicles with Charging Constraints Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. Abstract | Links | BibTeX | Tags: control, learning, multi-robot systems @conference{Munir2024c, title = {Route Planning for Electric Vehicles with Charging Constraints}, author = {Aiman Munir, Ramviyas Parasuraman, Jin Ye, WenZhan Song}, url = {https://ieeexplore.ieee.org/abstract/document/10757558}, doi = {10.1109/VTC2024-Fall63153.2024.10757558}, year = {2024}, date = {2024-10-10}, booktitle = {2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall)}, pages = {2577-2465}, abstract = {Recent studies demonstrate the efficacy of machine learning algorithms for learning strategies to solve combinatorial optimization problems. This study presents a novel solution to address the Electric Vehicle Routing Problem with Time Windows (EVRPTW), leveraging deep reinforcement learning (DRL) techniques. Existing DRL approaches frequently encounter challenges when addressing the EVRPTW problem: RNN-based decoders struggle with capturing long-term dependencies, while DDQN models exhibit limited generalization across various problem sizes. To overcome these limitations, we introduce a transformer-based model with a heterogeneous attention mechanism. Transformers excel at capturing long-term dependencies and demonstrate superior generalization across diverse problem instances. We validate the efficacy of our proposed approach through comparative analysis against two state-of-the-art solutions for EVRPTW. The results demonstrated the efficacy of the proposed model in minimizing the distance traveled and robust generalization across varying problem sizes. }, keywords = {control, learning, multi-robot systems}, pubstate = {published}, tppubtype = {conference} } Recent studies demonstrate the efficacy of machine learning algorithms for learning strategies to solve combinatorial optimization problems. This study presents a novel solution to address the Electric Vehicle Routing Problem with Time Windows (EVRPTW), leveraging deep reinforcement learning (DRL) techniques. Existing DRL approaches frequently encounter challenges when addressing the EVRPTW problem: RNN-based decoders struggle with capturing long-term dependencies, while DDQN models exhibit limited generalization across various problem sizes. To overcome these limitations, we introduce a transformer-based model with a heterogeneous attention mechanism. Transformers excel at capturing long-term dependencies and demonstrate superior generalization across diverse problem instances. We validate the efficacy of our proposed approach through comparative analysis against two state-of-the-art solutions for EVRPTW. The results demonstrated the efficacy of the proposed model in minimizing the distance traveled and robust generalization across varying problem sizes. |
 | Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning Conference 2024 ACM/SIGAPP Symposium on Applied Computing (SAC) , IRMAS Track 2024. Abstract | Links | BibTeX | Tags: control, learning @conference{Yang2024, title = {Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dl.acm.org/doi/10.1145/3605098.3636113}, doi = {10.1145/3605098.3636113}, year = {2024}, date = {2024-04-08}, booktitle = {2024 ACM/SIGAPP Symposium on Applied Computing (SAC) }, series = {IRMAS Track}, abstract = {Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel directed acyclic strategy graph decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method -- soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare our method against the state-of-the-art deep reinforcement learning algorithms on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. }, keywords = {control, learning}, pubstate = {published}, tppubtype = {conference} } Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel directed acyclic strategy graph decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method -- soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare our method against the state-of-the-art deep reinforcement learning algorithms on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. |
2023 |
|
 | Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot, planning @article{Munir2022b, title = {Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1424-8220/23/23/9600}, doi = {10.3390/s23239600}, year = {2023}, date = {2023-12-04}, journal = {Sensors}, volume = {23}, number = {23}, abstract = {Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable.}, keywords = {control, mapping, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable. |
 | HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. Abstract | Links | BibTeX | Tags: control, multi-robot, swarm-robotics @conference{Starks2023, title = {HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support}, author = {Michael Starks and Aryan Gupta and Sanjay Sarma O V and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10039174}, doi = {10.1109/SII55687.2023.10039174}, year = {2023}, date = {2023-01-23}, booktitle = {2023 IEEE/SICE International Symposium on System Integrations (SII 2023) }, publisher = {IEEE}, abstract = {Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations.}, keywords = {control, multi-robot, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). Abstract | Links | BibTeX | Tags: control, multi-robot, planning @workshop{Munir2023, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir, Ayan Dutta, and Ramviyas Parasuraman}, url = {https://sites.bu.edu/mrs2023/program/list-of-accepted-papers-and-presentations/}, year = {2023}, date = {2023-12-06}, booktitle = {IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {Presented as Poster Paper}, keywords = {control, multi-robot, planning}, pubstate = {published}, tppubtype = {workshop} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
2022 |
|
 | Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. Abstract | Links | BibTeX | Tags: control, cooperation, networking @article{Tahir2022b, title = {Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = {10.1109/TSMC.2022.3216206}, issn = {2168-2232}, year = {2022}, date = {2022-12-01}, journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes.}, keywords = {control, cooperation, networking}, pubstate = {published}, tppubtype = {article} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes. |
 | Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. Abstract | Links | BibTeX | Tags: control, multi-robot-systems, multiagent-systems, planning @conference{Yang2022, title = {Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy}, author = {Qin Yang and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2206.01109.pdf Paper: https://ieeexplore.ieee.org/abstract/document/9861828 Codes: https://github.com/herolab-uga/gut-pursuit-evasion-robotarium}, year = {2022}, date = {2022-06-21}, booktitle = {ISR Europe 2022; 54th International Symposium on Robotics }, pages = {278-284}, abstract = {Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {control, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. Abstract | Links | BibTeX | Tags: control, multi-robot systems, networking @workshop{Tahir2022, title = {Collaborative Control of Mobile Robots Using Analog Twin Framework}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://sites.google.com/ualberta.ca/2022workshop-ai-for-hri-cr-ar}, year = {2022}, date = {2022-05-23}, booktitle = {ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications.}, keywords = {control, multi-robot systems, networking}, pubstate = {published}, tppubtype = {workshop} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications. |
2020 |
|
 | Multi-Point Rendezvous in Multi-Robot Systems Journal Article IEEE Transactions on Cybernetics, 50 (1), pp. 310-323, 2020, ISBN: 2168-2275. Abstract | Links | BibTeX | Tags: control, herding, multi-robot systems, robotics @article{Parasuraman2018b, title = {Multi-Point Rendezvous in Multi-Robot Systems}, author = {Ramviyas Parasuraman and Jonghoek Kim and Shaocheng Luo and Byung-Cheol Min}, url = {https://ieeexplore.ieee.org/document/8472798}, doi = {10.1109/TCYB.2018.2868870}, isbn = {2168-2275}, year = {2020}, date = {2020-01-01}, journal = {IEEE Transactions on Cybernetics}, volume = {50}, number = {1}, pages = {310-323}, abstract = {Multi-robot rendezvous control and coordination strategies have garnered significant interest in recent years because of their potential applications in decentralized tasks. In this paper, we introduce a coordinate-free rendezvous control strategy to enable multiple robots to gather at different locations (dynamic leader robots) by tracking their hierarchy in a connected interaction graph. A key novelty in this strategy is the gathering of robots in different groups rather than at a single consensus point, motivated by autonomous multi-point recharging and flocking control problems. We show that the proposed rendezvous strategy guarantees convergence and maintains connectivity while accounting for practical considerations such as robots with limited speeds and an obstacle-rich environment. The algorithm is distributed and handles minor faults such as a broken immobile robot and a sudden link failure. In addition, we propose an approach that determines the locations of rendezvous points based on the connected interaction topology and indirectly optimizes the total energy consumption for rendezvous in all robots. Through extensive experiments with the Robotarium multi-robot testbed, we verified and demonstrated the effectiveness of our approach and its properties.}, keywords = {control, herding, multi-robot systems, robotics}, pubstate = {published}, tppubtype = {article} } Multi-robot rendezvous control and coordination strategies have garnered significant interest in recent years because of their potential applications in decentralized tasks. In this paper, we introduce a coordinate-free rendezvous control strategy to enable multiple robots to gather at different locations (dynamic leader robots) by tracking their hierarchy in a connected interaction graph. A key novelty in this strategy is the gathering of robots in different groups rather than at a single consensus point, motivated by autonomous multi-point recharging and flocking control problems. We show that the proposed rendezvous strategy guarantees convergence and maintains connectivity while accounting for practical considerations such as robots with limited speeds and an obstacle-rich environment. The algorithm is distributed and handles minor faults such as a broken immobile robot and a sudden link failure. In addition, we propose an approach that determines the locations of rendezvous points based on the connected interaction topology and indirectly optimizes the total energy consumption for rendezvous in all robots. Through extensive experiments with the Robotarium multi-robot testbed, we verified and demonstrated the effectiveness of our approach and its properties. |
 | Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots Workshop RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation, 2020. Abstract | Links | BibTeX | Tags: control, human-robot interaction, networking, robotics @workshop{Tahir2020, title = {Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ankitbhatia.github.io/reacting_contact_workshop/}, year = {2020}, date = {2020-07-12}, booktitle = {RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation}, abstract = {Adaptation to increasing levels of autonomy - from manual teleoperation to complete automation is of particular interest to Field Robotics and Human-Robot Interaction community. Towards that line of research, we introduce and investigate a novel bilaterally teleoperation control strategy for a robot to the robot system. A bilateral teleoperation scheme is typically applied to human control of robots. In this abstract, we look at a different perspective of using a bilateral teleoperation system between robots, where one robot (Labor) is teleoperated by an autonomous robot (Master). To realize such a strategy, our proposed robot-system is divided into a master-labor networked scheme where the master robot is located at a remote site operable by a human user or an autonomous agent and a labor robot; the follower robot is located on operation site. The labor robot is capable of reflecting the odometry commands of the master robot meanwhile also navigating its environment by obstacle detection and avoidance mechanism. An autonomous algorithm such as a typical SLAM-based path planner is controlling the master robot, which is provided with a suitable force feedback informative of the labor response by its interaction with the environment. We perform preliminary experiments to verify the system feasibility and analyze the motion transparency in different scenarios. The results show promise to investigate this research further and develop this work towards human multi-robot teleoperation.}, keywords = {control, human-robot interaction, networking, robotics}, pubstate = {published}, tppubtype = {workshop} } Adaptation to increasing levels of autonomy - from manual teleoperation to complete automation is of particular interest to Field Robotics and Human-Robot Interaction community. Towards that line of research, we introduce and investigate a novel bilaterally teleoperation control strategy for a robot to the robot system. A bilateral teleoperation scheme is typically applied to human control of robots. In this abstract, we look at a different perspective of using a bilateral teleoperation system between robots, where one robot (Labor) is teleoperated by an autonomous robot (Master). To realize such a strategy, our proposed robot-system is divided into a master-labor networked scheme where the master robot is located at a remote site operable by a human user or an autonomous agent and a labor robot; the follower robot is located on operation site. The labor robot is capable of reflecting the odometry commands of the master robot meanwhile also navigating its environment by obstacle detection and avoidance mechanism. An autonomous algorithm such as a typical SLAM-based path planner is controlling the master robot, which is provided with a suitable force feedback informative of the labor response by its interaction with the environment. We perform preliminary experiments to verify the system feasibility and analyze the motion transparency in different scenarios. The results show promise to investigate this research further and develop this work towards human multi-robot teleoperation. |
2019 |
|
 | Multi-robot Rendezvous Based on Bearing-aided Hierarchical Tracking of Network Topology Journal Article Ad hoc Networks, 86 , pp. 131-143, 2019. Abstract | Links | BibTeX | Tags: control, multi-robot-systems @article{Luo2019, title = {Multi-robot Rendezvous Based on Bearing-aided Hierarchical Tracking of Network Topology}, author = {Shaocheng Luo, Jonghoek Kim, Ramviyas Parasuraman, Jun Han Bae, Eric T Matson, Byung-Cheol Min}, url = {https://www.sciencedirect.com/science/article/pii/S1570870518301100}, doi = {10.1016/j.adhoc.2018.11.004}, year = {2019}, date = {2019-04-01}, journal = {Ad hoc Networks}, volume = {86}, pages = {131-143}, abstract = {Rendezvous control is an important module of a multi-robot system to enable formation control of multiple robots without losing network connectivity. This paper introduces a new coordinate-free, bearing-only algorithm, based on hierarchical tracking of wireless network topology, to enable rendezvous of distributed mobile robots at any designated leader robot node. An assumption is made that the robot can only detect and communicate with their neighbors (i.e., local sensing). The proposed approach preserves connectivity during the rendezvous task, adapts to dynamic changes in the network topology (e.g., losing or re-gaining a communication link), and is tolerant of mobility faults in the robots. We theoretically analyze the proposed algorithm and experimentally demonstrate the approach through simulations and extensive field experiments. The results indicate that the method is effective in a variety of realistic scenarios in which the robots are distributed in a cluttered environment. }, keywords = {control, multi-robot-systems}, pubstate = {published}, tppubtype = {article} } Rendezvous control is an important module of a multi-robot system to enable formation control of multiple robots without losing network connectivity. This paper introduces a new coordinate-free, bearing-only algorithm, based on hierarchical tracking of wireless network topology, to enable rendezvous of distributed mobile robots at any designated leader robot node. An assumption is made that the robot can only detect and communicate with their neighbors (i.e., local sensing). The proposed approach preserves connectivity during the rendezvous task, adapts to dynamic changes in the network topology (e.g., losing or re-gaining a communication link), and is tolerant of mobility faults in the robots. We theoretically analyze the proposed algorithm and experimentally demonstrate the approach through simulations and extensive field experiments. The results indicate that the method is effective in a variety of realistic scenarios in which the robots are distributed in a cluttered environment. |
2018 |
|
 | Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. Abstract | Links | BibTeX | Tags: control, multi-robot, networking, robotics @conference{Parasuraman2018, title = {Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals}, author = {Ramviyas Parasuraman and Byung-Cheol Min.}, url = {https://www.youtube.com/watch?v=6BkFrJ8vceg&feature=youtu.be}, year = {2018}, date = {2018-10-15}, abstract = {In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers.}, keywords = {control, multi-robot, networking, robotics}, pubstate = {published}, tppubtype = {conference} } In multi-robot applications, consensus control and coordination are vital and potentially repetitive tasks. To circumvent practical limitations such as a global localization system, researchers have focused on bearing-based consensus controllers, but most assumed that measurements from sensors (e.g. vision) are noise-free. In this paper, we propose to use wireless signal measurements to estimate the direction of arrival (relative bearings) of neighboring robots and introduce a weighted bearing consensus controller to achieve coordinate-free distributed multi-robot rendezvous. We prove that the proposed controller guarantees connectivity maintenance and convergence even in the presence of measurement noise. We conduct extensive numerical simulation experiments using the Robotarium multi-robot platform to verify and demonstrate the properties of the proposed controller and to compare the performance of the rendezvous task against several state-of-the-art rendezvous controllers. |
Publications
2026 |
|
| Distributed Connectivity Restoration and Improvement in Networked Robots Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Why Cognitive Robotics Matters: Lessons from OntoAgent and LLM Deployment in HARMONIC for Safety-Critical Robot Teaming Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| H-IPP: Altitude-Adaptive Informative Path Planning with Multiple UAVs Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| Safe and Adaptive Multi‑Robot Formation Control Via Composed CBFs in the Presence of Dynamic and Uncertain Obstacles Conference Forthcoming 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Forthcoming. |
| 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
| Multi-Robot Informative Sampling and Coverage in GPS-Denied Environments Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
| Energy-Aware Informative Path Planning for Heterogeneous Multi-Robot Systems Conference 2026 IEEE International Conference on Robotics & Automation (ICRA), 2026. |
2025 |
|
| Real-World Cyber Security Demonstration for Networked Electric Drives Journal Article IEEE Journal of Emerging and Selected Topics in Power Electronics, 13 (4), 2025. |
| Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. |
| Autonomous Navigation of a Quadruped Robot to Approach Floor Eggs and Path Optimization Analysis for Commercial Feasibility Journal Article American Society of Agricultural and Biological Engineers, 41 (6), pp. 733-747, 2025. |
| 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025. |
| H-Cov: Multi-UAV Sensor Coverage with Altitude Optimization for Target Tracking Workshop IEEE ICRA 2025 Workshop on 25 YEARS OF AERIAL ROBOTICS: CHALLENGES AND OPPORTUNITIES, 2025. |
2024 |
|
| Bayesian Strategy Networks Based Soft Actor-Critic Learning Journal Article ACM Transactions on Intelligent Systems and Technology, 15 (3), pp. 1–24, 2024. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, 2024, (In Press). |
| Route Planning for Electric Vehicles with Charging Constraints Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. |
| Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning Conference 2024 ACM/SIGAPP Symposium on Applied Computing (SAC) , IRMAS Track 2024. |
2023 |
|
| Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. |
| HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). |
2022 |
|
| Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. |
| Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. |
| Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. |
2020 |
|
| Multi-Point Rendezvous in Multi-Robot Systems Journal Article IEEE Transactions on Cybernetics, 50 (1), pp. 310-323, 2020, ISBN: 2168-2275. |
| Robot Controlling Robots - A New Perspective to Bilateral Teleoperation in Mobile Robots Workshop RSS 2020 Workshop on Reacting to Contact: Enabling Transparent Interactions through Intelligent Sensing and Actuation, 2020. |
2019 |
|
| Multi-robot Rendezvous Based on Bearing-aided Hierarchical Tracking of Network Topology Journal Article Ad hoc Networks, 86 , pp. 131-143, 2019. |
2018 |
|
| Consensus Control of Distributed Robots Using Direction of Arrival of Wireless Signals Conference 2018. |