
2025 |
|
 | IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. Abstract | Links | BibTeX | Tags: behavior-trees, cooperation, multi-robot @article{Venkata2025, title = {IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping}, author = {Sanjay Sarma Oruganti Venkata and Ramviyas Parasuraman and Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/document/10976677}, doi = {10.1109/TCYB.2025.3560564}, year = {2025}, date = {2025-04-25}, journal = {IEEE Transactions on Cybernetics}, abstract = {Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication.}, keywords = {behavior-trees, cooperation, multi-robot}, pubstate = {published}, tppubtype = {article} } Multiagent and multirobot systems (MRS) often rely on direct communication for information sharing. This work explores an alternative approach inspired by eavesdropping mechanisms in nature that involves casual observation of agent interactions to enhance decentralized knowledge dissemination. We achieve this through a novel indirect knowledge transfer through behavior trees (IKT-BT) framework tailored for a behavior-based MRS, encapsulating knowledge and control actions in behavior trees (BT). We present two new BT-based modalities—eavesdrop-update (EU) and eavesdrop-buffer-update (EBU)—incorporating unique eavesdropping strategies and efficient episodic memory management suited for resource-limited swarm robots. We theoretically analyze the IKT-BT framework for an MRS and validate the performance of the proposed modalities through extensive experiments simulating a search and rescue mission. Our results reveal improvements in both global mission performance outcomes and agent-level knowledge dissemination with a reduced need for direct communication. |
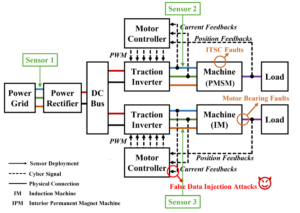 | Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. Abstract | Links | BibTeX | Tags: control, networking @article{Wu2024, title = {Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation}, author = {Wu, Shushan and Yang, Bowen and Yang, He and Coshatt, Stephen J. and Gong, Xilin and Parasuraman, Ramviyas Nattanmai and Conrad, Justin and Perdisci, Roberto and Zhong, Wenxuan and Ye, Jin and Ma, Ping and Song, WenZhan}, url = {https://ieeexplore.ieee.org/abstract/document/10769069}, doi = {10.1109/JIOT.2024.3476268}, year = {2025}, date = {2025-03-15}, journal = {IEEE Internet of Things Journal}, volume = {12}, number = {6}, pages = {6457-646}, abstract = {The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. }, keywords = {control, networking}, pubstate = {published}, tppubtype = {article} } The emergence of networked electrical machines has increased susceptibility to anomalies, including cyber-attack and physical faults, potentially leading to significant operational disruptions. In this article, we propose an online adaptive anomaly detection algorithm, adaptive enveloped singular spectrum transformation (AdaESST), which aims to identify hard-to-detect anomalies effectively. AdaESST first extracts informative components of signals by embedding the waveform data into subspaces using singular value decomposition, and then calculates anomalous score based on the subspace distance between two subsequence time series. AdaESST outperforms traditional detection methods by its capacity to adjust to new operational scenarios, thereby offering persistent protection in dynamic industrial environments. Throughout all numerical experiments simulating real-world industrial conditions, AdaESST exhibits high detection accuracy in monitoring motor and point of common coupling (PCC) currents, demonstrating its capability to safeguard against sophisticated anomalies. The detection accuracy for PCC currents is on par with that for motor currents. In essence, AdaESST has the potential to reduce the requirements for sensors, thereby lowering maintenance costs while maintaining high data integrity and security. The work contributes to enhancing the security of networked electrical machines, presenting a resilient and cost-efficient strategy in the face of emerging anomalies. |
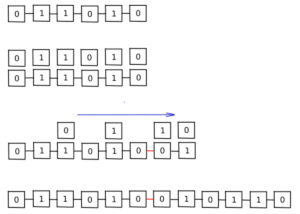 | Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols Conference 4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025), 2025. Abstract | Links | BibTeX | Tags: multi-robot systems, networking @conference{Gąsieniec2025, title = {Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols}, author = { Leszek Gąsieniec, Łukasz Kuszner, Ehsan Latif, Ramviyas Parasuraman, Paul Spirakis, Grzegorz Stachowiak}, url = {https://drops.dagstuhl.de/entities/document/10.4230/LIPIcs.SAND.2025.19}, doi = {10.4230/LIPIcs.SAND.2025.19}, year = {2025}, date = {2025-06-02}, booktitle = {4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025)}, abstract = {In the distributed localization problem (DLP), n anonymous robots (agents) A₀, …, A_{n-1} begin at arbitrary positions p₀, …, p_{n-1} ∈ S, where S is a Euclidean space. Initially, each agent A_i operates within its own coordinate system in S, which may be inconsistent with those of other agents. The primary goal in DLP is for agents to reach a consensus on a unified coordinate system that accurately reflects the relative positions of all points, p₀, …, p_{n-1}, in S. Extensive research on DLP has primarily focused on the feasibility and complexity of achieving consensus when agents have limited access to inter-agent distances, often due to missing or imprecise data. In this paper, however, we examine a minimalist, computationally efficient model of distributed computing in which agents have access to all pairwise distances, if needed. Specifically, we introduce a novel variant of population protocols, referred to as the spatial population protocols model. In this variant each agent can memorise one or a fixed number of coordinates, and when agents A_i and A_j interact, they can not only exchange their current knowledge but also either determine the distance d_{ij} between them in S (distance query model) or obtain the vector v→_{ij} spanning points p_i and p_j (vector query model). We present here a leader-based localisation protocol with distance queries. }, keywords = {multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } In the distributed localization problem (DLP), n anonymous robots (agents) A₀, …, A_{n-1} begin at arbitrary positions p₀, …, p_{n-1} ∈ S, where S is a Euclidean space. Initially, each agent A_i operates within its own coordinate system in S, which may be inconsistent with those of other agents. The primary goal in DLP is for agents to reach a consensus on a unified coordinate system that accurately reflects the relative positions of all points, p₀, …, p_{n-1}, in S. Extensive research on DLP has primarily focused on the feasibility and complexity of achieving consensus when agents have limited access to inter-agent distances, often due to missing or imprecise data. In this paper, however, we examine a minimalist, computationally efficient model of distributed computing in which agents have access to all pairwise distances, if needed. Specifically, we introduce a novel variant of population protocols, referred to as the spatial population protocols model. In this variant each agent can memorise one or a fixed number of coordinates, and when agents A_i and A_j interact, they can not only exchange their current knowledge but also either determine the distance d_{ij} between them in S (distance query model) or obtain the vector v→_{ij} spanning points p_i and p_j (vector query model). We present here a leader-based localisation protocol with distance queries. |
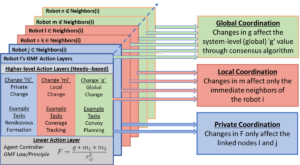 | GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems Conference Forthcoming 2025 IEEE International Conference on Robotics and Automation (ICRA), Forthcoming. Abstract | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Starks2025, title = {GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems}, author = {Michael Starks and Ramviyas Parasuraman}, year = {2025}, date = {2025-05-23}, booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)}, abstract = {Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws.}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {forthcoming}, tppubtype = {conference} } Distributed multi-robot coordination is critical to achieving reliable robotic missions that exploit the collective capability of swarm robots. In particular, the consensus and formation control problems have been extensively studied, resulting in distributed controllers that enable robots to rely only on information from themselves and their immediate neighbors. However, these algorithms are usually designed for specific objectives (e.g., cooperative object transportation, environmental coverage, etc.), requiring the controllers to be re-designed for domain variations. Therefore, we propose a new parametric framework inspired by gravitational fields that allow simultaneous coordination of robots at multiple levels, enabling generalization and domain adaptation. Our approach is built on top of a connectivity-preserving formation controller, with need-based and task-based ad hoc coordination at private, local, and global layers of a swarm robot team. We demonstrate the remarkable potential of our framework through extensive simulations and real-world swarm robot experiments in three representative multi-robot tasks involving tight coordination: 1) robot-initiated rendezvous at different coordination layers, 2) coordinated boundary tracking and coverage of environmental processes, and 3) accommodating task executions and motion control while satisfying the coordination laws. |
2024 |
|
 | Bayesian Strategy Networks Based Soft Actor-Critic Learning Journal Article ACM Transactions on Intelligent Systems and Technology, 15 (3), pp. 1–24, 2024. Abstract | Links | BibTeX | Tags: control, learning @article{Yang2024b, title = {Bayesian Strategy Networks Based Soft Actor-Critic Learning}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dl.acm.org/doi/10.1145/3643862}, doi = {10.1145/3643862}, year = {2024}, date = {2024-03-29}, journal = {ACM Transactions on Intelligent Systems and Technology}, volume = {15}, number = {3}, pages = {1–24}, abstract = {A strategy refers to the rules that the agent chooses the available actions to achieve goals. Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system’s utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. Our method achieves the state-of-the-art performance on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. Furthermore, we extend the topic to the Multi-Agent systems (MAS), discussing the potential research fields and directions.}, keywords = {control, learning}, pubstate = {published}, tppubtype = {article} } A strategy refers to the rules that the agent chooses the available actions to achieve goals. Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system’s utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. Our method achieves the state-of-the-art performance on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. Furthermore, we extend the topic to the Multi-Agent systems (MAS), discussing the potential research fields and directions. |
 | Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. Abstract | Links | BibTeX | Tags: cooperation, learning, mapping, multi-robot, networking @article{Latif2024b, title = {Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10413563}, doi = {10.1109/LRA.2024.3358095}, year = {2024}, date = {2024-03-01}, journal = {IEEE Robotics and Automation Letters}, volume = {9}, number = {3}, pages = {2622 - 2629}, abstract = {Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. }, keywords = {cooperation, learning, mapping, multi-robot, networking}, pubstate = {published}, tppubtype = {article} } Frontier exploration and reinforcement learning have historically been used to solve the problem of enabling many mobile robots to autonomously and cooperatively explore complex surroundings. These methods need to keep an internal global map for navigation, but they do not take into consideration the high costs of communication and information sharing between robots. This study offers CQLite, a novel distributed Q-learning technique designed to minimize data communication overhead between robots while achieving rapid convergence and thorough coverage in multi-robot exploration. The proposed CQLite method uses ad hoc map merging, and selectively shares updated Q-values at recently identified frontiers to significantly reduce communication costs. The theoretical analysis of CQLite's convergence and efficiency, together with extensive numerical verification on simulated indoor maps utilizing several robots, demonstrates the method's novelty. With over 2x reductions in computation and communication alongside improved mapping performance, CQLite outperformed cutting-edge multi-robot exploration techniques like Rapidly Exploring Random Trees and Deep Reinforcement Learning. |
 | Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, networking @article{Latif2023c, title = {Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10185556}, doi = {10.1109/JIOT.2023.3296334}, year = {2024}, date = {2024-01-15}, journal = {IEEE Internet of Things Journal}, volume = {11}, number = {2}, pages = {2783 - 2795}, abstract = {Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. }, keywords = {cooperation, localization, networking}, pubstate = {published}, tppubtype = {article} } Localizing mobile robotic nodes in indoor and GPS-denied environments is a complex problem, particularly in dynamic, unstructured scenarios where traditional cameras and LIDAR-based sensing and localization modalities may fail. Alternatively, wireless signal-based localization has been extensively studied in the literature yet primarily focuses on fingerprinting and feature-matching paradigms, requiring dedicated environment-specific offline data collection. We propose an online robot localization algorithm enabled by collaborative wireless sensor nodes to remedy these limitations. Our approach's core novelty lies in obtaining the Collaborative Direction of Arrival (CDOA) of wireless signals by exploiting the geometric features and collaboration between wireless nodes. The CDOA is combined with the Expectation Maximization (EM) and Particle Filter (PF) algorithms to calculate the Gaussian probability of the node's location with high efficiency and accuracy. The algorithm relies on RSSI-only data, making it ubiquitous to resource-constrained devices. We theoretically analyze the approach and extensively validate the proposed method's consistency, accuracy, and computational efficiency in simulations, real-world public datasets, as well as real robot demonstrations. The results validate the method's real-time computational capability and demonstrate considerably-high centimeter-level localization accuracy, outperforming relevant state-of-the-art localization approaches. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference Forthcoming The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, Forthcoming, (In Press). Abstract | BibTeX | Tags: control, cooperation, multi-robot, planning @conference{Munir2024b, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir and Ayan Dutta and Ramviyas Parasuraman}, year = {2024}, date = {2024-10-31}, booktitle = {The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {In Press}, keywords = {control, cooperation, multi-robot, planning}, pubstate = {forthcoming}, tppubtype = {conference} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: localization, multi-robot, networking @conference{Latif2024c, title = {HGP-RL: Distributed Hierarchical Gaussian Processes for Wi-Fi-based Relative Localization in Multi-Robot Systems }, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802653}, doi = {10.1109/IROS58592.2024.10802653}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3387-3394}, abstract = {Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots.}, keywords = {localization, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Relative localization is crucial for multi-robot systems to perform cooperative tasks, especially in GPS-denied environments. Current techniques for multi-robot relative localization rely on expensive or short-range sensors such as cameras and LIDARs. As a result, these algorithms face challenges such as high computational complexity (e.g., map merging), dependencies on well-structured environments, etc. To remedy this gap, we propose a new distributed approach to perform relative localization (RL) using a common Access Point (AP). To achieve this efficiently, we propose a novel Hierarchical Gaussian Processes (HGP) mapping of the Radio Signal Strength Indicator (RSSI) values from a Wi-Fi AP to which the robots are connected. Each robot performs hierarchical inference using the HGP map to locate the AP in its reference frame, and the robots obtain relative locations of the neighboring robots leveraging AP-oriented algebraic transformations. The approach readily applies to resource-constrained devices and relies only on the ubiquitously-available WiFi RSSI measurement. We extensively validate the performance of the proposed HGR-PL in Robotarium simulations against several state-of-the-art methods. The results indicate superior performance of HGP-RL regarding localization accuracy, computation, and communication overheads. Finally, we showcase the utility of HGP-RL through a multi-robot cooperative experiment to achieve a rendezvous task in a team of three mobile robots. |
 | 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: learning, mapping, perception @conference{Ravipati2024, title = {Object-Oriented Material Classification and 3D Clustering for Improved Semantic Perception and Mapping in Mobile Robots}, author = {Siva Krishna Ravipati and Ehsan Latif and Suchendra Bhandarkar and Ramviyas Parasuraman }, url = {https://ieeexplore.ieee.org/document/10801936}, doi = {10.1109/IROS58592.2024.10801936}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {9729-9736}, abstract = {Classification of different object surface material types can play a significant role in the decision-making algorithms for mobile robots and autonomous vehicles. RGB-based scene-level semantic segmentation has been well-addressed in the literature. However, improving material recognition using the depth modality and its integration with SLAM algorithms for 3D semantic mapping could unlock new potential benefits in the robotics perception pipeline. To this end, we propose a complementarity-aware deep learning approach for RGB-D-based material classification built on top of an object-oriented pipeline. The approach further integrates the ORB-SLAM2 method for 3D scene mapping with multiscale clustering of the detected material semantics in the point cloud map generated by the visual SLAM algorithm. Extensive experimental results with existing public datasets and newly contributed real-world robot datasets demonstrate a significant improvement in material classification and 3D clustering accuracy compared to state-of-the-art approaches for 3D semantic scene mapping. }, keywords = {learning, mapping, perception}, pubstate = {published}, tppubtype = {conference} } Classification of different object surface material types can play a significant role in the decision-making algorithms for mobile robots and autonomous vehicles. RGB-based scene-level semantic segmentation has been well-addressed in the literature. However, improving material recognition using the depth modality and its integration with SLAM algorithms for 3D semantic mapping could unlock new potential benefits in the robotics perception pipeline. To this end, we propose a complementarity-aware deep learning approach for RGB-D-based material classification built on top of an object-oriented pipeline. The approach further integrates the ORB-SLAM2 method for 3D scene mapping with multiscale clustering of the detected material semantics in the point cloud map generated by the visual SLAM algorithm. Extensive experimental results with existing public datasets and newly contributed real-world robot datasets demonstrate a significant improvement in material classification and 3D clustering accuracy compared to state-of-the-art approaches for 3D semantic scene mapping. |
 | Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. Abstract | Links | BibTeX | Tags: cooperation, localization, multi-robot, planning @conference{Munir2024, title = {Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage}, author = {Aiman Munir and Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10802222}, doi = {10.1109/IROS58592.2024.10802222}, year = {2024}, date = {2024-10-13}, booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, pages = {3395-3402}, abstract = {Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. }, keywords = {cooperation, localization, multi-robot, planning}, pubstate = {published}, tppubtype = {conference} } Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS. |
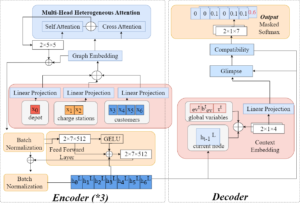 | Route Planning for Electric Vehicles with Charging Constraints Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. Abstract | Links | BibTeX | Tags: control, learning, multi-robot systems @conference{Munir2024c, title = {Route Planning for Electric Vehicles with Charging Constraints}, author = {Aiman Munir, Ramviyas Parasuraman, Jin Ye, WenZhan Song}, url = {https://ieeexplore.ieee.org/abstract/document/10757558}, doi = {10.1109/VTC2024-Fall63153.2024.10757558}, year = {2024}, date = {2024-10-10}, booktitle = {2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall)}, pages = {2577-2465}, abstract = {Recent studies demonstrate the efficacy of machine learning algorithms for learning strategies to solve combinatorial optimization problems. This study presents a novel solution to address the Electric Vehicle Routing Problem with Time Windows (EVRPTW), leveraging deep reinforcement learning (DRL) techniques. Existing DRL approaches frequently encounter challenges when addressing the EVRPTW problem: RNN-based decoders struggle with capturing long-term dependencies, while DDQN models exhibit limited generalization across various problem sizes. To overcome these limitations, we introduce a transformer-based model with a heterogeneous attention mechanism. Transformers excel at capturing long-term dependencies and demonstrate superior generalization across diverse problem instances. We validate the efficacy of our proposed approach through comparative analysis against two state-of-the-art solutions for EVRPTW. The results demonstrated the efficacy of the proposed model in minimizing the distance traveled and robust generalization across varying problem sizes. }, keywords = {control, learning, multi-robot systems}, pubstate = {published}, tppubtype = {conference} } Recent studies demonstrate the efficacy of machine learning algorithms for learning strategies to solve combinatorial optimization problems. This study presents a novel solution to address the Electric Vehicle Routing Problem with Time Windows (EVRPTW), leveraging deep reinforcement learning (DRL) techniques. Existing DRL approaches frequently encounter challenges when addressing the EVRPTW problem: RNN-based decoders struggle with capturing long-term dependencies, while DDQN models exhibit limited generalization across various problem sizes. To overcome these limitations, we introduce a transformer-based model with a heterogeneous attention mechanism. Transformers excel at capturing long-term dependencies and demonstrate superior generalization across diverse problem instances. We validate the efficacy of our proposed approach through comparative analysis against two state-of-the-art solutions for EVRPTW. The results demonstrated the efficacy of the proposed model in minimizing the distance traveled and robust generalization across varying problem sizes. |
 | Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. Abstract | Links | BibTeX | Tags: computing, multi-robot systems, networking @conference{Tahir2024, title = {Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles}, author = {Nazish Tahir, Ramviyas Parasuraman, Haijian Sun}, url = {https://ieeexplore.ieee.org/abstract/document/10757784}, doi = {10.1109/VTC2024-Fall63153.2024.10757784}, year = {2024}, date = {2024-10-10}, booktitle = {2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall)}, pages = {2577-2465}, abstract = {Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. }, keywords = {computing, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency. |
 | PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Conference The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024, 2024. Abstract | Links | BibTeX | Tags: assistive devices, human-robot interaction, human-robot interface @conference{Latif2024bb, title = {PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations}, author = {Ehsan Latif and Ramviyas Parasuraman and Xiaoming Zhai}, doi = {10.1109/RO-MAN60168.2024.10731312}, year = {2024}, date = {2024-08-30}, booktitle = {The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024}, abstract = { Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. }, keywords = {assistive devices, human-robot interaction, human-robot interface}, pubstate = {published}, tppubtype = {conference} } Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p $<$ 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p $<$ 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education. |
 | Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). Abstract | Links | BibTeX | Tags: multi-robot, networking @conference{Zhang2024, title = {Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications}, author = {Lihao Zhang, Haijian Sun, Jin Sun, Ramviyas Parasuraman, Yinghui Ye, Rose Qingyang Hu}, url = {https://ieeexplore.ieee.org/document/10622509}, doi = {10.1109/ICC51166.2024.10622509}, year = {2024}, date = {2024-06-13}, booktitle = {2024 IEEE International Conference on Communications (ICC)}, abstract = {Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency.}, note = {Accepted for Presentation at ICC 2024}, keywords = {multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } Urban vehicle-to-vehicle (V2V) link scheduling with shared spectrum is a challenging problem. Its main goal is to find the scheduling policy that can maximize system performance (usually the sum capacity of each link or their energy efficiency). Given that each link can experience interference from all other active links, the scheduling becomes a combinatorial integer programming problem and generally does not scale well with the number of V2V pairs. Moreover, link scheduling requires accurate channel state information (CSI), which is very difficult to estimate with good accuracy under high vehicle mobility. In this paper, we propose an end-to-end urban V2V link scheduling method called Map2Schedule, which can directly generate V2V scheduling policy from the city map and vehicle locations. Map2Schedule delivers comparable performance to the physical-model-based methods in urban settings while maintaining low computation complexity. This enhanced performance is achieved by machine learning (ML) technologies. Specifically, we first deploy the convolutional neural network (CNN) model to estimate the CSI from street layout and vehicle locations and then apply the graph embedding model for optimal scheduling policy. The results show that the proposed method can achieve high accuracy with much lower overhead and latency. |
 | Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning Conference 2024 ACM/SIGAPP Symposium on Applied Computing (SAC) , IRMAS Track 2024. Abstract | Links | BibTeX | Tags: control, learning @conference{Yang2024, title = {Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dl.acm.org/doi/10.1145/3605098.3636113}, doi = {10.1145/3605098.3636113}, year = {2024}, date = {2024-04-08}, booktitle = {2024 ACM/SIGAPP Symposium on Applied Computing (SAC) }, series = {IRMAS Track}, abstract = {Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel directed acyclic strategy graph decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method -- soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare our method against the state-of-the-art deep reinforcement learning algorithms on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. }, keywords = {control, learning}, pubstate = {published}, tppubtype = {conference} } Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel directed acyclic strategy graph decomposition approach based on Bayesian chaining to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method -- soft actor-critic (SAC), and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare our method against the state-of-the-art deep reinforcement learning algorithms on the standard continuous control benchmarks in the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. |
2023 |
|
 | Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. Abstract | Links | BibTeX | Tags: control, mapping, multi-robot, planning @article{Munir2022b, title = {Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1424-8220/23/23/9600}, doi = {10.3390/s23239600}, year = {2023}, date = {2023-12-04}, journal = {Sensors}, volume = {23}, number = {23}, abstract = {Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable.}, keywords = {control, mapping, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Adaptive information-sampling approaches enable efficient selection of mobile robots’ waypoints through which the accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. A key parameter in the informative sampling objective function could be optimized balance the need to explore new information where the uncertainty is very high and to exploit the data sampled so far, with which a great deal of the underlying spatial fields can be obtained, such as the source locations or modalities of the physical process. However, works in the literature have either assumed the robot’s energy is unconstrained or used a homogeneous availability of energy capacity among different robots. Therefore, this paper analyzes the impact of the adaptive information-sampling algorithm’s information function used in exploration and exploitation to achieve a tradeoff between balancing the mapping, localization, and energy efficiency objectives. We use Gaussian process regression (GPR) to predict and estimate confidence bounds, thereby determining each point’s informativeness. Through extensive experimental data, we provide a deeper and holistic perspective on the effect of information function parameters on the prediction map’s accuracy (RMSE), confidence bound (variance), energy consumption (distance), and time spent (sample count) in both single- and multi-robot scenarios. The results provide meaningful insights into choosing the appropriate energy-aware information function parameters based on sensing objectives (e.g., source localization or mapping). Based on our analysis, we can conclude that it would be detrimental to give importance only to the uncertainty of the information function (which would explode the energy needs) or to the predictive mean of the information (which would jeopardize the mapping accuracy). By assigning more importance to the information uncertainly with some non-zero importance to the information value (e.g., 75:25 ratio), it is possible to achieve an optimal tradeoff between exploration and exploitation objectives while keeping the energy requirements manageable. |
 | On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning Journal Article Algorithms, 16 (11), pp. 498, 2023. Abstract | Links | BibTeX | Tags: planning @article{Latif2023e, title = {On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://www.mdpi.com/1999-4893/16/11/498}, doi = {10.3390/a16110498}, year = {2023}, date = {2023-10-27}, journal = {Algorithms}, volume = {16}, number = {11}, pages = {498}, abstract = {In the mathematical discipline of computational geometry (CG), practical algorithms for resolving geometric input and output issues are designed, analyzed, and put into practice. It is sometimes used to refer to pattern recognition and to define the solid modeling methods for manipulating curves and surfaces. CG is a rich field encompassing theories to solve complex optimization problems, such as path planning for mobile robot systems and extension to distributed multi-robot systems. This brief review discusses the fundamentals of CG and its application in solving well-known automated path-planning problems in single- and multi-robot systems. We also discuss three winning algorithms from the CG-SHOP (Computational Geometry: Solving Hard Optimization Problems) 2021 competition to evidence the practicality of CG in multi-robotic systems. We also mention some open problems at the intersection of CG and robotics. This review provides insights into the potential use of CG in robotics and future research directions at their intersection.}, keywords = {planning}, pubstate = {published}, tppubtype = {article} } In the mathematical discipline of computational geometry (CG), practical algorithms for resolving geometric input and output issues are designed, analyzed, and put into practice. It is sometimes used to refer to pattern recognition and to define the solid modeling methods for manipulating curves and surfaces. CG is a rich field encompassing theories to solve complex optimization problems, such as path planning for mobile robot systems and extension to distributed multi-robot systems. This brief review discusses the fundamentals of CG and its application in solving well-known automated path-planning problems in single- and multi-robot systems. We also discuss three winning algorithms from the CG-SHOP (Computational Geometry: Solving Hard Optimization Problems) 2021 competition to evidence the practicality of CG in multi-robotic systems. We also mention some open problems at the intersection of CG and robotics. This review provides insights into the potential use of CG in robotics and future research directions at their intersection. |
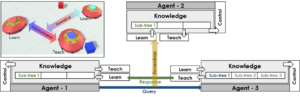
 | KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. Abstract | Links | BibTeX | Tags: autonomy, behavior-trees, heterogeneity, multi-robot, planning @article{Venkata2023b, title = {KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems}, author = {Sanjay Sarma Oruganti Venkata, Ramviyas Parasuraman, Ramana Pidaparti}, url = {https://ieeexplore.ieee.org/abstract/document/10183654}, doi = {10.1109/TRO.2023.3290449}, year = {2023}, date = {2023-07-13}, journal = {IEEE Transactions on Robotics}, volume = {30}, number = {5}, pages = {4114 - 4130}, abstract = {Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights.}, keywords = {autonomy, behavior-trees, heterogeneity, multi-robot, planning}, pubstate = {published}, tppubtype = {article} } Multi-Robot and Multi-Agent Systems demonstrate collective (swarm) intelligence through systematic and distributed integration of local behaviors in a group. Agents sharing knowledge about the mission and environment can enhance performance at individual and mission levels. However, this is difficult to achieve, partly due to the lack of a generic framework for transferring part of the known knowledge (behaviors) between agents. This paper presents a new knowledge representation framework and a transfer strategy called KT-BT: Knowledge Transfer through Behavior Trees. The KT-BT framework follows a query-response-update mechanism through an online Behavior Tree framework, where agents broadcast queries for unknown conditions and respond with appropriate knowledge using a condition-action-control sub-flow. We embed a novel grammar structure called stringBT that encodes knowledge, enabling behavior sharing. We theoretically investigate the properties of the KT-BT framework in achieving homogeneity of high knowledge across the entire group compared to a heterogeneous system without the capability of sharing their knowledge. We extensively verify our framework in a simulated multi-robot search and rescue problem. The results show successful knowledge transfers and improved group performance in various scenarios. We further study the effects of opportunities and communication range on group performance, knowledge spread, and functional heterogeneity in a group of agents, presenting interesting insights. |
 | Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. Abstract | Links | BibTeX | Tags: networking, planning @article{Parasuraman2023, title = {Rapid prediction of network quality in mobile robots}, author = {Ramviyas Parasuraman and Byung-Cheol Min and Petter Ögren}, doi = {10.1016/j.adhoc.2022.103014}, issn = {1570-8705}, year = {2023}, date = {2023-01-01}, journal = {Ad Hoc Networks}, volume = {138}, abstract = {Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation.}, keywords = {networking, planning}, pubstate = {published}, tppubtype = {article} } Mobile robots rely on wireless networks for sharing sensor data from remote missions. The robot’s spatial network quality will vary considerably across a given mission environment and network access point (AP) location, which are often unknown apriori. Therefore, predicting these spatial variations becomes essential and challenging, especially in dynamic and unstructured environments. To address this challenge, we propose an online algorithm to predict wireless connection quality measured through the well-exploited Radio Signal Strength (RSS) metric in the future positions along a mobile robot’s trajectory. We assume no knowledge of the environment or AP positions other than robot odometry and RSS measurements at the previous trajectory points. We propose a discrete Kalman filter-based solution considering path loss and shadowing effects. The algorithm is evaluated with unique real-world datasets in indoor, outdoor, and underground data showing prediction accuracy of up to 96%, revealing significant performance improvements over conventional approaches, including Gaussian Processes Regression. Having such accurate predictions will help the robot plan its trajectory and task operations in a communication-aware manner ensuring mission success. Further, we extensively analyze the approach regarding the impacts of localization error, source location, mobility, antenna type, and connection failures on prediction accuracy, providing novel perspectives and observations for performance evaluation. |
 | Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023c, title = {Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473568}, doi = {10.1109/IRC59093.2023.00060}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } To circumvent persistent connectivity to the cloud infrastructure, the current emphasis on computing at network edge devices in the multi-robot domain is a promising enabler for delay-sensitive jobs, yet its adoption is rife with challenges. This paper proposes a novel utility-aware dynamic task offloading strategy based on a multi-edge-robot system that takes into account computation, communication, and task execution load to minimize the overall service time for delay-sensitive applications. Prior to task offloading, continuous device, network, and task profiling are performed, and for each task assigned, an edge with maximum utility is derived using a weighted utility maximization technique, and a system reward assignment for task connectivity or sensitivity is performed. A scheduler is in charge of task assignment, whereas an executor is responsible for task offloading on edge devices. Experimental comparisons of the proposed approach with conventional offloading methods indicate better performance in terms of optimizing resource utilization and minimizing task latency. |
 | Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. Abstract | Links | BibTeX | Tags: computing, multi-robot, networking @conference{Tahir2023b, title = {Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10473544}, doi = {10.1109/IRC59093.2023.00059}, year = {2023}, date = {2023-12-13}, booktitle = {2023 Sixth IEEE International Conference on Robotic Computing (IRC)}, abstract = {We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems.}, keywords = {computing, multi-robot, networking}, pubstate = {published}, tppubtype = {conference} } We propose integrating the edge-computing paradigm into the multi-robot collaborative scheduling to maximize resource utilization for complex collaborative tasks, which many robots must perform together. Examples include collaborative map-merging to produce a live global map during exploration instead of traditional approaches that schedule tasks on centralized cloud-based systems to facilitate computing. Our decentralized approach to a consensus-based scheduling strategy benefits a multi-robot-edge collaboration system by adapting to dynamic computation needs and communication-changing statistics as the system tries to optimize resources while maintaining overall performance objectives. Before collaborative task offloading, continuous device, and network profiling are performed at the computing resources, and the distributed scheduling scheme then selects the resource with maximum utility derived using a utility maximization approach. Thorough evaluations with and without edge servers on simulation and real-world multi-robot systems demonstrate that a lower task latency, a large throughput gain, and better frame rate processing may be achieved compared to the conventional edge-based systems. |
 | SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. Abstract | Links | BibTeX | Tags: cooperation, localization, mapping, multi-robot @conference{Latif2023b, title = {SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10342157}, doi = {10.1109/IROS55552.2023.10342157}, year = {2023}, date = {2023-10-05}, booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)}, organization = {IEEE}, abstract = {The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications.}, keywords = {cooperation, localization, mapping, multi-robot}, pubstate = {published}, tppubtype = {conference} } The availability of accurate localization is critical for multi-robot exploration strategies; noisy or inconsistent localization causes failure in meeting exploration objectives. We aim to achieve high localization accuracy with contemporary exploration map belief and vice versa without needing global localization information. This paper proposes a novel simultaneous exploration and localization (SEAL) approach, which uses Gaussian Processes (GP)-based information fusion for maximum exploration while performing communication graph optimization for relative localization. Both these cross-dependent objectives were integrated through the Rao-Blackwellization technique. Distributed linearized convex hull optimization is used to select the next-best unexplored region for distributed exploration. SEAL outperformed cutting-edge methods on exploration and localization performance in extensive ROS-Gazebo simulations, illustrating the practicality of the approach in real-world applications. |
 | Systems Design Concepts mimicking Bio-inspired Self-assembly Conference 9th International Conference on Research Into Design (ICoRD), Springer, 2023. Abstract | Links | BibTeX | Tags: behavior-trees, design, multiagent-systems @conference{Venkata2023, title = {Systems Design Concepts mimicking Bio-inspired Self-assembly}, author = {Sanjay Sarma Oruganti Venkata and Cameron Ardoin and Israr M. Ibrahim and Ramviyas Parasuraman and Ramana M Pidaparti}, url = {https://link.springer.com/chapter/10.1007/978-981-99-0428-0_31}, doi = {10.1007/978-981-99-0428-0_31}, year = {2023}, date = {2023-07-25}, booktitle = {9th International Conference on Research Into Design (ICoRD)}, publisher = {Springer}, abstract = {Design of complex self-assembly systems requires intelligent solutions that can be manufactured effectively and efficiently. Self-organization is the spontaneous formation of organized structures that can dynamically reconfigure with changing environments. These processes are primarily observed in chemical and biological processes that resemble large-scale ecosystems and in environments as small as biological cells. Inspired by these natural processes, there is also a growing research interest in developing 4D Design and printing technologies in which 3D structures reconfigure with changing stimuli. The 4D design process requires appropriate design, computational and simulation tools aimed at building structures at larger scales that can augment the current engineering design and manufacturing processes. This study presents a new multi-agent framework with two new paradigms called agents-as-blocks and free-agent. We present further details on these new strategies in the form of preliminary case studies applied to simulating micro-environments of microtubules’ self-organization process and through a vibration simulation platform. Our simulation results closely follow the real formation patterns in the microtubules process and show some interesting self-organizing and self-assembling patterns that change with varying geometries, rules, and stimuli in a vibration-platform environment.}, keywords = {behavior-trees, design, multiagent-systems}, pubstate = {published}, tppubtype = {conference} } Design of complex self-assembly systems requires intelligent solutions that can be manufactured effectively and efficiently. Self-organization is the spontaneous formation of organized structures that can dynamically reconfigure with changing environments. These processes are primarily observed in chemical and biological processes that resemble large-scale ecosystems and in environments as small as biological cells. Inspired by these natural processes, there is also a growing research interest in developing 4D Design and printing technologies in which 3D structures reconfigure with changing stimuli. The 4D design process requires appropriate design, computational and simulation tools aimed at building structures at larger scales that can augment the current engineering design and manufacturing processes. This study presents a new multi-agent framework with two new paradigms called agents-as-blocks and free-agent. We present further details on these new strategies in the form of preliminary case studies applied to simulating micro-environments of microtubules’ self-organization process and through a vibration simulation platform. Our simulation results closely follow the real formation patterns in the microtubules process and show some interesting self-organizing and self-assembling patterns that change with varying geometries, rules, and stimuli in a vibration-platform environment. |
 | Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. Abstract | Links | BibTeX | Tags: cooperation, mapping, multi-robot, multi-robot systems, networking @conference{Latif2023, title = {Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration}, author = {Ehsan Latif and WenZhan Song and Ramviyas Parasuraman}, doi = {10.1109/INFOCOMWKSHPS57453.2023.10226167}, year = {2023}, date = {2023-05-01}, booktitle = {IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS)}, abstract = {Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios.}, keywords = {cooperation, mapping, multi-robot, multi-robot systems, networking}, pubstate = {published}, tppubtype = {conference} } Smooth coordination within a swarm robotic system is essential for the effective execution of collective robot missions. Having efficient communication is key to the successful coordination of swarm robots. This paper proposes a new communication-efficient decentralized cooperative reinforcement learning algorithm for coordinating swarm robots. It is made efficient by hierarchically building on the use of local information exchanges. We consider a case study application of maze solving through cooperation among a group of robots, where the time and costs are minimized while avoiding inter-robot collisions and path overlaps during exploration. With a solid theoretical basis, we extensively analyze the algorithm with realistic CORE network simulations and evaluate it against state-of-the-art solutions in terms of maze coverage percentage and efficiency under communication-degraded environments. The results demonstrate significantly higher coverage accuracy and efficiency while reducing costs and overlaps even in high packet loss and low communication range scenarios. |
 | The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). Abstract | Links | BibTeX | Tags: cooperation, multi-robot-systems, multiagent-systems, planning @conference{Yang2023, title = {A hierarchical game-theoretic decision-making for cooperative multiagent systems under the presence of adversarial agents}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://acmsac-irmas2023.isr.uc.pt/index.php/track-program}, year = {2023}, date = {2023-03-31}, booktitle = {The 38th ACM/SIGAPP Symposium On Applied Computing}, series = {IRMAS}, abstract = {Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, note = {Oral Presentation. Acceptance Rate: <25%}, keywords = {cooperation, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among Multi-Agent Systems (MAS) in hazardous scenarios can be represented as Game-theoretic models. This paper proposes a new hierarchical network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions. It combines with a new payoff measure based on agent needs for real-time strategy games. We present an Explore game domain, where we measure the performance of MAS achieving tasks from the perspective of balancing the success probability and system costs. We evaluate the GUT approach against state-of-the-art methods that greedily rely on the rewards of the composite actions. Conclusive results on extensive numerical simulations indicate that GUT can organize more complex relationships among MAS cooperation, helping the group achieve challenging tasks with lower costs and higher winning rates. Furthermore, we demonstrated the applicability of the GUT using the simulator-hardware testbed - Robotarium. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. Abstract | Links | BibTeX | Tags: autonomy, cooperation, networking @conference{Tahir2023, title = {Mobile Robot Control and Autonomy Through Collaborative Twin}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = { 10.1109/PerComWorkshops56833.2023.10150325}, year = {2023}, date = {2023-03-17}, booktitle = {2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events}, abstract = {When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches.}, keywords = {autonomy, cooperation, networking}, pubstate = {published}, tppubtype = {conference} } When a mobile robot lacks high onboard computing or networking capabilities, it can rely on remote computing architecture for its control and autonomy. In this paper, we introduce a novel collaborative twin strategy for control and autonomy on resource-constrained robots. The practical implementation of such a strategy entails a mobile robot system divided into a cyber (simulated) and physical (real) space separated over a communication channel where the physical robot resides on the site of operation guided by a simulated autonomous agent from a remote location maintained over a network. Building on top of the digital twin concept, our collaboration twin is capable of autonomous navigation through an advanced SLAM-based path planning algorithm, while the physical robot is capable of tracking the Simulated twin's velocity and communicating feedback generated through interaction with its environment. We proposed a prioritized path planning application to the test in a collaborative teleoperation system of a physical robot guided by Simulation Twin's autonomous navigation. We examine the performance of a physical robot led by autonomous navigation from the Collaborative Twin and assisted by a predicted force received from the physical robot. The experimental findings indicate the practicality of the proposed simulation-physical twinning approach and provide computational and network performance improvements compared to typical remote computing and digital twin approaches. |
 | A Strategy-Oriented Bayesian Soft Actor-Critic Model Conference Procedia Computer Science, 220 , ANT 2023 Elsevier, 2023. Abstract | Links | BibTeX | Tags: autonomy, learning @conference{Yang2023b, title = {A Strategy-Oriented Bayesian Soft Actor-Critic Model}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://www.sciencedirect.com/science/article/pii/S1877050923006063}, doi = {10.1016/j.procs.2023.03.071}, year = {2023}, date = {2023-03-17}, booktitle = {Procedia Computer Science}, journal = {Procedia Computer Science}, volume = {220}, pages = {561-566}, publisher = {Elsevier}, series = {ANT 2023}, abstract = {Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on the Bayesian chain rule to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC) and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare the proposed BSAC method with the SAC and other state-of-the-art approaches such as TD3, DDPG, and PPO on the standard continuous control benchmarks – Hopper-v2, Walker2d-v2, and Humanoid-v2 – in MuJoCo with the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency.}, keywords = {autonomy, learning}, pubstate = {published}, tppubtype = {conference} } Adopting reasonable strategies is challenging but crucial for an intelligent agent with limited resources working in hazardous, unstructured, and dynamic environments to improve the system's utility, decrease the overall cost, and increase mission success probability. This paper proposes a novel hierarchical strategy decomposition approach based on the Bayesian chain rule to separate an intricate policy into several simple sub-policies and organize their relationships as Bayesian strategy networks (BSN). We integrate this approach into the state-of-the-art DRL method – soft actor-critic (SAC) and build the corresponding Bayesian soft actor-critic (BSAC) model by organizing several sub-policies as a joint policy. We compare the proposed BSAC method with the SAC and other state-of-the-art approaches such as TD3, DDPG, and PPO on the standard continuous control benchmarks – Hopper-v2, Walker2d-v2, and Humanoid-v2 – in MuJoCo with the OpenAI Gym environment. The results demonstrate that the promising potential of the BSAC method significantly improves training efficiency. |
 | HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. Abstract | Links | BibTeX | Tags: control, multi-robot, swarm-robotics @conference{Starks2023, title = {HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support}, author = {Michael Starks and Aryan Gupta and Sanjay Sarma O V and Ramviyas Parasuraman}, url = {https://ieeexplore.ieee.org/document/10039174}, doi = {10.1109/SII55687.2023.10039174}, year = {2023}, date = {2023-01-23}, booktitle = {2023 IEEE/SICE International Symposium on System Integrations (SII 2023) }, publisher = {IEEE}, abstract = {Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations.}, keywords = {control, multi-robot, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these important attributes by focusing on one of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform, with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple, yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations. |
 | Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). Abstract | Links | BibTeX | Tags: control, multi-robot, planning @workshop{Munir2023, title = {Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System}, author = {Aiman Munir, Ayan Dutta, and Ramviyas Parasuraman}, url = {https://sites.bu.edu/mrs2023/program/list-of-accepted-papers-and-presentations/}, year = {2023}, date = {2023-12-06}, booktitle = {IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023}, abstract = {We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.}, note = {Presented as Poster Paper}, keywords = {control, multi-robot, planning}, pubstate = {published}, tppubtype = {workshop} } We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy depletion rates due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots, for instance, UAVs hovering at different altitudes. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy needs and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy. |
 | CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. Abstract | Links | BibTeX | Tags: cooperation, exploration, multi-robot @workshop{Latif2023d, title = {CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {https://sites.google.com/view/camrs-icra2023/contributed-papers}, year = {2023}, date = {2023-06-02}, booktitle = {ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning}, abstract = {Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication.}, keywords = {cooperation, exploration, multi-robot}, pubstate = {published}, tppubtype = {workshop} } Multiple mobile robots must autonomously navigate and cooperatively explore complex environments in practical applications. Traditional methods face high communication and update costs of map merging. We propose CQLite, a distributed Q-learning-based approach with a coverage-weighted reward function and reduced communication overhead. CQLite's convergence and efficiency are analyzed theoretically and validated experimentally, outperforming RRT and DRL techniques with over 2x reduction in computation and communication. |
2022 |
|
 | Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. Abstract | Links | BibTeX | Tags: control, cooperation, networking @article{Tahir2022b, title = {Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots}, author = {Nazish Tahir and Ramviyas Parasuraman}, doi = {10.1109/TSMC.2022.3216206}, issn = {2168-2232}, year = {2022}, date = {2022-12-01}, journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes.}, keywords = {control, cooperation, networking}, pubstate = {published}, tppubtype = {article} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or cloud-based control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel priority-based supervised bilateral teleoperation strategy for goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a Master-Client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The Master robot controls the Client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput and delay), task performance (tracking error and goal reach accuracy), and computing efficiency (memory and CPU utilization). Extensive simulations and real-world experiments demonstrate the method's novelty, flexibility, and versatility in realizing reactive planning applications with remote computational offloading capabilities compared to conventional offloading schemes. |
 | DGORL: Distributed Graph Optimization based Relative Localization of Multi-Robot Systems Conference The 16th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2022, 2022, (Nominated for the Best Student Paper Award). Abstract | BibTeX | Tags: localization, multi-robot systems @conference{Latif2022c, title = {DGORL: Distributed Graph Optimization based Relative Localization of Multi-Robot Systems}, author = {Ehsan Latif and Ramviyas Parasuraman}, year = {2022}, date = {2022-11-30}, booktitle = {The 16th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2022}, abstract = {An optimization problem is at the heart of many robotics estimating, planning, and optimum control problems. Several attempts have been made at model-based multi-robot localization, and few have formulated the multi-robot collaborative localization problem as a factor graph problem to solve through graph optimization. Here, the optimization objective is to minimize the errors of estimating the relative location estimates in a distributed manner. Our novel graph-theoretic approach to solving this problem consists of three major components; (connectivity) graph formation, expansion through transition model, and optimization of relative poses. First, we estimate the relative pose-connectivity graph using the received signal strength between the connected robots, indicating relative ranges between them. Then, we apply a motion model to formulate graph expansion and optimize them using g$^2$o graph optimization as a distributed solver over dynamic networks. Finally, we theoretically analyze the algorithm and numerically validate its optimality and performance through extensive simulations. The results demonstrate the practicality of the proposed solution compared to a state-of-the-art algorithm for collaborative localization in multi-robot systems.}, note = {Nominated for the Best Student Paper Award}, keywords = {localization, multi-robot systems}, pubstate = {published}, tppubtype = {conference} } An optimization problem is at the heart of many robotics estimating, planning, and optimum control problems. Several attempts have been made at model-based multi-robot localization, and few have formulated the multi-robot collaborative localization problem as a factor graph problem to solve through graph optimization. Here, the optimization objective is to minimize the errors of estimating the relative location estimates in a distributed manner. Our novel graph-theoretic approach to solving this problem consists of three major components; (connectivity) graph formation, expansion through transition model, and optimization of relative poses. First, we estimate the relative pose-connectivity graph using the received signal strength between the connected robots, indicating relative ranges between them. Then, we apply a motion model to formulate graph expansion and optimize them using g$^2$o graph optimization as a distributed solver over dynamic networks. Finally, we theoretically analyze the algorithm and numerically validate its optimality and performance through extensive simulations. The results demonstrate the practicality of the proposed solution compared to a state-of-the-art algorithm for collaborative localization in multi-robot systems. |
 | 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), IEEE, 2022. Abstract | Links | BibTeX | Tags: evaluation, networking, robotics @conference{Pandey2022, title = {Empirical Analysis of Bi-directional Wi-Fi Network Performance on Mobile Robots in Indoor Environments}, author = {Pranav Pandey and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2110.03011.pdf Codes: https://github.com/herolab-uga/ros-network-analysis Paper: https://ieeexplore.ieee.org/abstract/document/9860438}, doi = {10.1109/VTC2022-Spring54318.2022.9860438}, year = {2022}, date = {2022-06-22}, booktitle = {2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring)}, pages = {1-7}, publisher = {IEEE}, abstract = {This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments.}, keywords = {evaluation, networking, robotics}, pubstate = {published}, tppubtype = {conference} } This paper proposes a framework to measure the important metrics (throughput, delay, packet retransmits, signal strength, etc.) to determine Wi-Fi network performance of mobile robots supported by the Robot Operating Systems (ROS) middleware. We analyze the bidirectional network performance of mobile robots through an experimental setup in an indoor environment, where a mobile robot is communicating vital sensor data such as video streaming from the camera(s) and LiDAR scan values to a command station while it navigates an indoor environment through teleoperated velocity commands received from the command station. The experiments evaluate the performance under 2.4 GHz and 5 GHz channels with different placement of Access Points (AP) with up to two network devices on each side. The framework is generalizable to vehicular network evaluation and the discussions and insights from this study apply to the field robotics community, where the wireless network plays a key role in enabling the success of robotic missions in real-world environments. |
 | Multi-Robot Synergistic Localization in Dynamic Environments Conference ISR Europe 2022; 54th International Symposium on Robotics, 2022. Abstract | Links | BibTeX | Tags: localization, multi-robot-systems @conference{Latif2022b, title = {Multi-Robot Synergistic Localization in Dynamic Environments}, author = {Ehsan Latif and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2206.03573.pdf Paper: https://ieeexplore.ieee.org/abstract/document/9861805}, year = {2022}, date = {2022-06-21}, booktitle = {ISR Europe 2022; 54th International Symposium on Robotics}, pages = {109-116}, abstract = {A mobile robot’s precise location information is critical for navigation and task processing, especially for a multi-robot system (MRS) to collaborate and collect valuable data from the field. However, a robot in situations where it does not have access to GPS signals, such as in an environmentally controlled, indoor, or underground environment, finds it difficult to locate using its sensor alone. As a result, robots sharing their local information to improve their localization estimates benefit the entire MRS team. There have been several attempts to model-based multi-robot localization using Radio Signal Strength Indicator (RSSI) as a source to calculate bearing information. We also utilize the RSSI for wireless networks generated through the communication of multiple robots in a system and aim to localize agents with high accuracy and efficiency in a dynamic environment for shared information fusion to refine the localization estimation. This estimator structure reduces one source of measurement correlation while appropriately incorporating others. This paper proposes a decentralized Multi-robot Synergistic Localization System (MRSL) for a dense and dynamic environment. Robots update their position estimation whenever new information receives from their neighbors. When the system senses the presence of other robots in the region, it exchanges position estimates and merges the received data to improve its localization accuracy. Our approach uses Bayesian rule-based integration, which has shown to be computationally efficient and applicable to asynchronous robotics communication. We have performed extensive simulation experiments with a varying number of robots to analyze the algorithm. MRSL’s localization accuracy with RSSI outperformed others on any number of robots, 66% higher than autonomous robot localization (ARL) (which works without collaboration between robots) and 32% higher than the collaborative multi-robot algorithm from the literature. Nevertheless, simulation results have shown significant promise in localization accuracy for many collaborating robots in a dynamic environment.}, keywords = {localization, multi-robot-systems}, pubstate = {published}, tppubtype = {conference} } A mobile robot’s precise location information is critical for navigation and task processing, especially for a multi-robot system (MRS) to collaborate and collect valuable data from the field. However, a robot in situations where it does not have access to GPS signals, such as in an environmentally controlled, indoor, or underground environment, finds it difficult to locate using its sensor alone. As a result, robots sharing their local information to improve their localization estimates benefit the entire MRS team. There have been several attempts to model-based multi-robot localization using Radio Signal Strength Indicator (RSSI) as a source to calculate bearing information. We also utilize the RSSI for wireless networks generated through the communication of multiple robots in a system and aim to localize agents with high accuracy and efficiency in a dynamic environment for shared information fusion to refine the localization estimation. This estimator structure reduces one source of measurement correlation while appropriately incorporating others. This paper proposes a decentralized Multi-robot Synergistic Localization System (MRSL) for a dense and dynamic environment. Robots update their position estimation whenever new information receives from their neighbors. When the system senses the presence of other robots in the region, it exchanges position estimates and merges the received data to improve its localization accuracy. Our approach uses Bayesian rule-based integration, which has shown to be computationally efficient and applicable to asynchronous robotics communication. We have performed extensive simulation experiments with a varying number of robots to analyze the algorithm. MRSL’s localization accuracy with RSSI outperformed others on any number of robots, 66% higher than autonomous robot localization (ARL) (which works without collaboration between robots) and 32% higher than the collaborative multi-robot algorithm from the literature. Nevertheless, simulation results have shown significant promise in localization accuracy for many collaborating robots in a dynamic environment. |
 | Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. Abstract | Links | BibTeX | Tags: control, multi-robot-systems, multiagent-systems, planning @conference{Yang2022, title = {Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy}, author = {Qin Yang and Ramviyas Parasuraman}, url = {Preprint: https://arxiv.org/pdf/2206.01109.pdf Paper: https://ieeexplore.ieee.org/abstract/document/9861828 Codes: https://github.com/herolab-uga/gut-pursuit-evasion-robotarium}, year = {2022}, date = {2022-06-21}, booktitle = {ISR Europe 2022; 54th International Symposium on Robotics }, pages = {278-284}, abstract = {Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {control, multi-robot-systems, multiagent-systems, planning}, pubstate = {published}, tppubtype = {conference} } Underlying relationships among multiagent systems (MAS) in hazardous scenarios can be represented as game-theoretic models. In adversarial environments, the adversaries can be intentional or unintentional based on their needs and motivations. Agents will adopt suitable decision-making strategies to maximize their current needs and minimize their expected costs. This paper proposes and extends the new hierarchical network-based model, termed Game-theoretic Utility Tree (GUT), to arrive at a cooperative pursuit strategy to catch an evader in the Pursuit-Evasion game domain. We verify and demonstrate the performance of the proposed method using the Robotarium platform compared to the conventional constant bearing (CB) and pure pursuit (PP) strategies. The experiments demonstrated the effectiveness of the GUT, and the performances validated that the GUT could effectively organize cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: behavior-trees, multiagent-systems, swarm-robotics @conference{Sarma2022, title = {A study on the ephemeral nature of knowledge shared between multi-agent and swarm systems through behavior trees}, author = {Sanjay Sarma and Ramviyas Parasuraman and Ramana Pidaparti}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, abstract = {Achieving knowledge sharing within an artificial swarm system could lead to significant development in autonomous multiagent and robotic systems research and realize collective intelligence. However, this is difficult to achieve since there is no generic framework to transfer skills between agents other than a query-response-based approach. Moreover, natural living systems have a "forgetfulness" property for everything they learn. Analyzing such ephemeral nature (temporal memory properties of new knowledge gained) in artificial systems has never been studied in the literature. We propose a behavior tree-based framework to realize a query-response mechanism for transferring skills encoded as the condition-action control subflow of that portion of the knowledge between agents to fill this gap. We simulate a multiagent group with different initial knowledge on a foraging mission. While performing basic operations, each robot queries other robots to respond to an unknown condition. The responding robot shares the control actions by sharing a portion of the behavior tree that addresses the queries. Specifically, we investigate the ephemeral nature of the new knowledge gained through such a framework, where the knowledge gained by the agent is either limited due to memory or is forgotten over time. Our investigations show that knowledge grows proportionally with the duration of remembrance, which is trivial. However, we found minimal impact in knowledge growth due to memory. We compare these cases against a baseline that involved full knowledge precoded on all agents. We found that the knowledge-sharing strived to match the baseline condition by sharing and achieving knowledge growth as a collective system. }, keywords = {behavior-trees, multiagent-systems, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Achieving knowledge sharing within an artificial swarm system could lead to significant development in autonomous multiagent and robotic systems research and realize collective intelligence. However, this is difficult to achieve since there is no generic framework to transfer skills between agents other than a query-response-based approach. Moreover, natural living systems have a "forgetfulness" property for everything they learn. Analyzing such ephemeral nature (temporal memory properties of new knowledge gained) in artificial systems has never been studied in the literature. We propose a behavior tree-based framework to realize a query-response mechanism for transferring skills encoded as the condition-action control subflow of that portion of the knowledge between agents to fill this gap. We simulate a multiagent group with different initial knowledge on a foraging mission. While performing basic operations, each robot queries other robots to respond to an unknown condition. The responding robot shares the control actions by sharing a portion of the behavior tree that addresses the queries. Specifically, we investigate the ephemeral nature of the new knowledge gained through such a framework, where the knowledge gained by the agent is either limited due to memory or is forgotten over time. Our investigations show that knowledge grows proportionally with the duration of remembrance, which is trivial. However, we found minimal impact in knowledge growth due to memory. We compare these cases against a baseline that involved full knowledge precoded on all agents. We found that the knowledge-sharing strived to match the baseline condition by sharing and achieving knowledge growth as a collective system. |
 | Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Gui2022, title = {Message Expiration-Based Distributed Multi-Robot Task Management}, author = {Yikang Gui and Ehsan Latif and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, abstract = {Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach. |
 | Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. Abstract | BibTeX | Tags: multi-robot, planning, swarm-robotics @conference{Latif2022, title = {Energy-Aware Multi-Robot Task Allocation in Persistent Tasks}, author = {Ehsan Latif and Yikang Gui and Aiman Munir and Ramviyas Parasuraman}, year = {2022}, date = {2022-01-27}, booktitle = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022)}, journal = {The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics}, abstract = {The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach.}, keywords = {multi-robot, planning, swarm-robotics}, pubstate = {published}, tppubtype = {conference} } The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach. |
 | A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. Abstract | Links | BibTeX | Tags: cooperation, multiagent-systems, planning @workshop{Yang2022b, title = {A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://dcslgatech.github.io/iros22-multi-agent-workshop/#section-program https://dcslgatech.github.io/iros22-multi-agent-workshop/contributed_papers/IROS22-DMMAS_paper_6456.pdf https://dcslgatech.github.io/iros22-multi-agent-workshop/posters/DMMAS_6456.pdf}, year = {2022}, date = {2022-10-27}, booktitle = {IROS 2022 Workshop on Decision Making in Multi-Agent Systems}, abstract = {Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance.}, keywords = {cooperation, multiagent-systems, planning}, pubstate = {published}, tppubtype = {workshop} } Underlying relationships among multi-agent systems (MAS) in hazardous scenarios can be represented as Game theoretic models. This paper proposes a new network-based model called Game-theoretic Utility Tree (GUT), which decomposes high-level strategies into executable low-level actions for cooperative MAS decisions in adversarial environments. It combines a new payoff measure based on agent needs for real-time strategy games. We demonstrated the applicability of the GUT using the Robotarium platform, which is a simulator-hardware testbed for verifying multi-robot system algorithms. The performances verified the effectiveness of the GUT in the real robot application and validated that the GUT could effectively organize MAS cooperation strategies, helping the group with fewer advantages achieve higher performance. |
 | Sharing Autonomy of Exploration and Exploitation via Control Interface Workshop ICRA 2022 Workshop on Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust, 2022. Abstract | Links | BibTeX | Tags: autonomy, human-robot interface, trust @workshop{Munir2022, title = {Sharing Autonomy of Exploration and Exploitation via Control Interface}, author = {Aiman Munir and Ramviyas Parasuraman}, url = {https://sites.google.com/view/saphri-icra2022/contributions}, year = {2022}, date = {2022-05-23}, booktitle = {ICRA 2022 Workshop on Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust}, abstract = {Shared autonomy is a control paradigm that refers to the adaptation of a robot’s autonomy level in dynamic environments while taking human intentions and status into account at the same time. Here, the autonomy level can be changed based on internal/external information and human input. However, there are no clear guidelines and studies that help understand ”when” should a robot adapt its autonomy level to different functionalities. Therefore, in this paper, we create a framework that helps to improve the human-robot control interface by allowing humans to adapt to the robots’ autonomy level as well as to create a study design to gather insights into human’s preference to switch autonomy levels based on the current situation. We create two high-level strategies - Exploration to gather more data and Exploitation to make use of current data - for a search and rescue task. These two strategies can be achieved with human inputs or autonomous algorithms. We intend to understand the human preferences to the autonomy levels (and ”when” they want to switch) to these two strategies. The analysis is expected to provide insights into designing shared autonomy schemes and algorithms to consider human preferences in adaptively using autonomy levels of certain high-level strategies.}, keywords = {autonomy, human-robot interface, trust}, pubstate = {published}, tppubtype = {workshop} } Shared autonomy is a control paradigm that refers to the adaptation of a robot’s autonomy level in dynamic environments while taking human intentions and status into account at the same time. Here, the autonomy level can be changed based on internal/external information and human input. However, there are no clear guidelines and studies that help understand ”when” should a robot adapt its autonomy level to different functionalities. Therefore, in this paper, we create a framework that helps to improve the human-robot control interface by allowing humans to adapt to the robots’ autonomy level as well as to create a study design to gather insights into human’s preference to switch autonomy levels based on the current situation. We create two high-level strategies - Exploration to gather more data and Exploitation to make use of current data - for a search and rescue task. These two strategies can be achieved with human inputs or autonomous algorithms. We intend to understand the human preferences to the autonomy levels (and ”when” they want to switch) to these two strategies. The analysis is expected to provide insights into designing shared autonomy schemes and algorithms to consider human preferences in adaptively using autonomy levels of certain high-level strategies. |
 | Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. Abstract | Links | BibTeX | Tags: control, multi-robot systems, networking @workshop{Tahir2022, title = {Collaborative Control of Mobile Robots Using Analog Twin Framework}, author = {Nazish Tahir and Ramviyas Parasuraman}, url = {https://sites.google.com/ualberta.ca/2022workshop-ai-for-hri-cr-ar}, year = {2022}, date = {2022-05-23}, booktitle = {ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics}, abstract = {Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications.}, keywords = {control, multi-robot systems, networking}, pubstate = {published}, tppubtype = {workshop} } Resource-constrained mobile robots that lack the capability to be completely autonomous can rely on a human or AI supervisor acting at a remote site (e.g., control station or cloud) for their control. Such a supervised autonomy or collaborative control of a robot poses high networking and computing capabilities requirements at both sites, which are not easy to achieve. This paper introduces and analyzes a new analog twin framework by synchronizing mobility between two mobile robots, where one robot acts as an analog twin to the other robot. We devise a novel collaborative priority-based bilateral teleoperation strategy for supervised goal navigation tasks to validate the proposed framework. The practical implementation of a supervised control strategy on this framework entails a mobile robot system divided into a master-client scheme over a communication channel where the Client robot resides on the site of operation guided by the Master robot through an agent (human or AI) from a remote location. The master robot controls the client robot with its autonomous navigation algorithm, which reacts to the predictive force received from the Client robot. We analyze the proposed strategy in terms of network performance (throughput), task performance (goal reach accuracy), task efficiency, and computing efficiency (CPU utilization). Real-world experiments demonstrate the method’s novelty and versatility in realizing more practical reactive and collaborative planning and control applications. |
 | On Physical Compatibility of Robots in Human-Robot Collaboration Settings Workshop ICRA 2022 WORKSHOP ON COLLABORATIVE ROBOTS AND THE WORK OF THE FUTURE, 2022. Abstract | Links | BibTeX | Tags: human-robot interaction @workshop{Pandey2022b, title = {On Physical Compatibility of Robots in Human-Robot Collaboration Settings}, author = {Pranav Pandey, Ramviyas Parasuraman, and Prashant Doshi}, url = {https://sites.google.com/view/icra22ws-cor-wotf/accepted-papers}, year = {2022}, date = {2022-05-23}, booktitle = {ICRA 2022 WORKSHOP ON COLLABORATIVE ROBOTS AND THE WORK OF THE FUTURE}, abstract = {Human-Robot Interaction (HRI) is a multidisciplinary field. It has become essential for robots to work with humans in collaboration and teamwork settings, such as collaborative assembly, where they share tasks in an overlapping workspace. While extensive research is available to ensure successful HRI, primarily focusing on the safety factors, our objective is to provide a comprehensive perspective on robot’s compatibility with humans in such settings. Specifically, we highlight the key pillars and elements of Physical Human-Robot Interaction (pHRI) and discuss the valuable metrics for evaluating such systems. To achieve compatibility, we propose that the robot ensure humans’ safety, flexibility in tasks, and robustness to changes in the environment. Ultimately, these elements will help assess robots’ awareness of humans and surroundings and help increase the trustworthiness of robots among human collaborators.}, keywords = {human-robot interaction}, pubstate = {published}, tppubtype = {workshop} } Human-Robot Interaction (HRI) is a multidisciplinary field. It has become essential for robots to work with humans in collaboration and teamwork settings, such as collaborative assembly, where they share tasks in an overlapping workspace. While extensive research is available to ensure successful HRI, primarily focusing on the safety factors, our objective is to provide a comprehensive perspective on robot’s compatibility with humans in such settings. Specifically, we highlight the key pillars and elements of Physical Human-Robot Interaction (pHRI) and discuss the valuable metrics for evaluating such systems. To achieve compatibility, we propose that the robot ensure humans’ safety, flexibility in tasks, and robustness to changes in the environment. Ultimately, these elements will help assess robots’ awareness of humans and surroundings and help increase the trustworthiness of robots among human collaborators. |
2021 |
|
 | 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. Abstract | Links | BibTeX | Tags: evaluation, multi-robot, planning, trust @conference{Yang2021, title = {How Can Robots Trust Each Other For Better Cooperation? A Relative Needs Entropy Based Robot-Robot Trust Assessment Model}, author = {Qin Yang and Ramviyas Parasuraman}, doi = {10.1109/SMC52423.2021.9659187}, year = {2021}, date = {2021-10-20}, booktitle = {2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC)}, pages = {2656--2663}, publisher = {IEEE}, organization = {IEEE}, abstract = {Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models.}, keywords = {evaluation, multi-robot, planning, trust}, pubstate = {published}, tppubtype = {conference} } Cooperation in multi-agent and multi-robot systems can help agents build various formations, shapes, and patterns presenting corresponding functions and purposes adapting to different situations. Relationships between agents such as their spatial proximity and functional similarities could play a crucial role in cooperation between agents. Trust level between agents is an essential factor in evaluating their relationships' reliability and stability, much as people do. This paper proposes a new model called Relative Needs Entropy (RNE) to assess trust between robotic agents. RNE measures the distance of needs distribution between individual agents or groups of agents. To exemplify its utility, we implement and demonstrate our trust model through experiments simulating a heterogeneous multi-robot grouping task in a persistent urban search and rescue mission consisting of tasks at two levels of difficulty. The results suggest that RNE trust-Based grouping of robots can achieve better performance and adaptability for diverse task execution compared to the state-of-the-art energy-based or distance-based grouping models. |
2020 |
|
 | Multi-Point Rendezvous in Multi-Robot Systems Journal Article IEEE Transactions on Cybernetics, 50 (1), pp. 310-323, 2020, ISBN: 2168-2275. Abstract | Links | BibTeX | Tags: control, herding, multi-robot systems, robotics @article{Parasuraman2018b, title = {Multi-Point Rendezvous in Multi-Robot Systems}, author = {Ramviyas Parasuraman and Jonghoek Kim and Shaocheng Luo and Byung-Cheol Min}, url = {https://ieeexplore.ieee.org/document/8472798}, doi = {10.1109/TCYB.2018.2868870}, isbn = {2168-2275}, year = {2020}, date = {2020-01-01}, journal = {IEEE Transactions on Cybernetics}, volume = {50}, number = {1}, pages = {310-323}, abstract = {Multi-robot rendezvous control and coordination strategies have garnered significant interest in recent years because of their potential applications in decentralized tasks. In this paper, we introduce a coordinate-free rendezvous control strategy to enable multiple robots to gather at different locations (dynamic leader robots) by tracking their hierarchy in a connected interaction graph. A key novelty in this strategy is the gathering of robots in different groups rather than at a single consensus point, motivated by autonomous multi-point recharging and flocking control problems. We show that the proposed rendezvous strategy guarantees convergence and maintains connectivity while accounting for practical considerations such as robots with limited speeds and an obstacle-rich environment. The algorithm is distributed and handles minor faults such as a broken immobile robot and a sudden link failure. In addition, we propose an approach that determines the locations of rendezvous points based on the connected interaction topology and indirectly optimizes the total energy consumption for rendezvous in all robots. Through extensive experiments with the Robotarium multi-robot testbed, we verified and demonstrated the effectiveness of our approach and its properties.}, keywords = {control, herding, multi-robot systems, robotics}, pubstate = {published}, tppubtype = {article} } Multi-robot rendezvous control and coordination strategies have garnered significant interest in recent years because of their potential applications in decentralized tasks. In this paper, we introduce a coordinate-free rendezvous control strategy to enable multiple robots to gather at different locations (dynamic leader robots) by tracking their hierarchy in a connected interaction graph. A key novelty in this strategy is the gathering of robots in different groups rather than at a single consensus point, motivated by autonomous multi-point recharging and flocking control problems. We show that the proposed rendezvous strategy guarantees convergence and maintains connectivity while accounting for practical considerations such as robots with limited speeds and an obstacle-rich environment. The algorithm is distributed and handles minor faults such as a broken immobile robot and a sudden link failure. In addition, we propose an approach that determines the locations of rendezvous points based on the connected interaction topology and indirectly optimizes the total energy consumption for rendezvous in all robots. Through extensive experiments with the Robotarium multi-robot testbed, we verified and demonstrated the effectiveness of our approach and its properties. |
 | Needs-driven Heterogeneous Multi-Robot Cooperation in Rescue Missions Conference 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. Abstract | Links | BibTeX | Tags: human-robot interaction, multi-robot-systems, robotics @conference{Yang2020b, title = {Needs-driven Heterogeneous Multi-Robot Cooperation in Rescue Missions}, author = {Qin Yang and Ramviyas Parasuraman}, url = {https://arxiv.org/abs/2009.00288}, year = {2020}, date = {2020-11-06}, booktitle = {2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020)}, abstract = {This paper focuses on the teaming aspects and the role of heterogeneity in a multi-robot system applied to robot-aided urban search and rescue (USAR) missions. We specifically propose a needs-driven multi-robot cooperation mechanism represented through a Behavior Tree structure and evaluate the performance of the system in terms of the group utility and energy cost to achieve the rescue mission in a limited time. From the theoretical analysis, we prove that the needs-drive cooperation in a heterogeneous robot system enables higher group utility compared to a homogeneous robot system. We also perform simulation experiments to verify the proposed needs-driven cooperation and show that the heterogeneous multi-robot cooperation can achieve better performance and increase system robustness by reducing uncertainty in task execution. Finally, we discuss the application to human-robot teaming.}, keywords = {human-robot interaction, multi-robot-systems, robotics}, pubstate = {published}, tppubtype = {conference} } This paper focuses on the teaming aspects and the role of heterogeneity in a multi-robot system applied to robot-aided urban search and rescue (USAR) missions. We specifically propose a needs-driven multi-robot cooperation mechanism represented through a Behavior Tree structure and evaluate the performance of the system in terms of the group utility and energy cost to achieve the rescue mission in a limited time. From the theoretical analysis, we prove that the needs-drive cooperation in a heterogeneous robot system enables higher group utility compared to a homogeneous robot system. We also perform simulation experiments to verify the proposed needs-driven cooperation and show that the heterogeneous multi-robot cooperation can achieve better performance and increase system robustness by reducing uncertainty in task execution. Finally, we discuss the application to human-robot teaming. |
 | 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. Abstract | BibTeX | Tags: behavior-trees, heterogeneity, multi-robot @conference{Venkata2020, title = {Impact of Heterogeneity in Multi-Robot Systems on Collective Behaviors Studied Using a Search and Rescue Problem}, author = {Sanjay Sarma Oruganti Venkata, Ramviyas Parasuraman, Ramana Pidaparti}, year = {2020}, date = {2020-11-06}, booktitle = {2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020)}, abstract = {Many species in nature demonstrate symbiotic relationships leading to emergent behaviors through cooperation, which are sometimes beyond the scope of the partnerships within the same species. These symbiotic relationships are classified as mutualism, commensalism, and parasitism based on the benefit levels involved. While these partnerships are ubiquitous in nature, it is imperative to understand the benefits of collective behaviors in designing heterogeneous multi-robot systems (HMRS). In this paper, we investigate the impact of heterogeneity on the performance of HMRS applied to a search and rescue problem. The groups consisting of searchers and rescuers, varied in the individual robot behaviors with multiple degrees of functionality overlap and group compositions, demonstrating various levels of heterogeneity. We propose a new technique to measure heterogeneity in the agents through the use of Behavior Trees and use it to obtain heterogeneity informatics from our Monte Carlo simulations. The results show a positive correlation between the groups’ heterogeneity measure and the rescue efficiency demonstrating benefits in most of the scenarios. However, we also see cases where heterogeneity may hamper the group’s abilities pointing to the need for determining the optimal heterogeneity in group required to maximally benefit from HMRS in real-world applications.}, keywords = {behavior-trees, heterogeneity, multi-robot}, pubstate = {published}, tppubtype = {conference} } Many species in nature demonstrate symbiotic relationships leading to emergent behaviors through cooperation, which are sometimes beyond the scope of the partnerships within the same species. These symbiotic relationships are classified as mutualism, commensalism, and parasitism based on the benefit levels involved. While these partnerships are ubiquitous in nature, it is imperative to understand the benefits of collective behaviors in designing heterogeneous multi-robot systems (HMRS). In this paper, we investigate the impact of heterogeneity on the performance of HMRS applied to a search and rescue problem. The groups consisting of searchers and rescuers, varied in the individual robot behaviors with multiple degrees of functionality overlap and group compositions, demonstrating various levels of heterogeneity. We propose a new technique to measure heterogeneity in the agents through the use of Behavior Trees and use it to obtain heterogeneity informatics from our Monte Carlo simulations. The results show a positive correlation between the groups’ heterogeneity measure and the rescue efficiency demonstrating benefits in most of the scenarios. However, we also see cases where heterogeneity may hamper the group’s abilities pointing to the need for determining the optimal heterogeneity in group required to maximally benefit from HMRS in real-world applications. |
 | Material Mapping in Unknown Environments using Tapping Sound Conference 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), 2020. Abstract | BibTeX | Tags: mapping, perception, robotics @conference{Kannan2020, title = {Material Mapping in Unknown Environments using Tapping Sound}, author = {Shyam Sundar Kannan and Wonse Jo and Ramviyas Parasuramanoiuytrewq and Byung-Cheol Min}, year = {2020}, date = {2020-10-29}, booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020)}, abstract = {In this paper, we propose an autonomous exploration and tapping mechanism-based material mapping system for a mobile robot in unknown environments. The proposed system integrates SLAM modules and sound-based material classification to enable a mobile robot to explore an unknown environment autonomously and at the same time identify the various objects and materials in the environment in an efficient manner, creating a material map which localizes the various materials in the environment over the occupancy grid. A tapping mechanism and tapping audio signal processing based on machine learning techniques are exploited for a robot to identify the objects and materials. We demonstrate the proposed system through experiments using a mobile robot platform installed with Velodyne LiDAR, a linear solenoid, and microphones in an exploration-like scenario with various materials. Experiment results demonstrate that the proposed system can create useful material maps in unknown environments.}, keywords = {mapping, perception, robotics}, pubstate = {published}, tppubtype = {conference} } In this paper, we propose an autonomous exploration and tapping mechanism-based material mapping system for a mobile robot in unknown environments. The proposed system integrates SLAM modules and sound-based material classification to enable a mobile robot to explore an unknown environment autonomously and at the same time identify the various objects and materials in the environment in an efficient manner, creating a material map which localizes the various materials in the environment over the occupancy grid. A tapping mechanism and tapping audio signal processing based on machine learning techniques are exploited for a robot to identify the objects and materials. We demonstrate the proposed system through experiments using a mobile robot platform installed with Velodyne LiDAR, a linear solenoid, and microphones in an exploration-like scenario with various materials. Experiment results demonstrate that the proposed system can create useful material maps in unknown environments. |
 | Hierarchical Needs Based Self-Adaptive Framework For Cooperative Multi-Robot System Conference IEEE SMC 2020 INTERNATIONAL CONFERENCE ON SYSTEMS, MAN, AND CYBERNETICS, 2020. Abstract | Links | BibTeX | Tags: behavior-trees, multi-robot systems @conference{Yang2020b, title = {Hierarchical Needs Based Self-Adaptive Framework For Cooperative Multi-Robot System}, author = {Qin Yang and Ramviyas Parasuraman}, url = {http://hero.uga.edu/wp-content/uploads/2020/10/SMC_2020___Qin_Yang___Hierarchical_Needs_Based_Multi_Robot_Task_Planning.pdf}, year = {2020}, date = {2020-10-11}, booktitle = {IEEE SMC 2020 INTERNATIONAL CONFERENCE ON SYSTEMS, MAN, AND CYBERNETICS}, abstract = {Research in multi-robot and swarm systems has seen significant interest in cooperation of agents in complex and dynamic environments. To effectively adapt to unknown environments and maximize the utility of the group, robots need to cooperate, share information, and make a suitable plan according to the specific scenario. Inspired by Maslow’s hierarchy of human needs and systems theory, we introduce Robot’s Need Hierarchy and propose a new solution called Self-Adaptive Swarm System (SASS). It combines multi-robot perception, communication, planning, and execution with the cooperative management of conflicts through a distributed Negotiation-Agreement Mechanism that prioritizes robot’s needs. We also decompose the complex tasks into simple executable behaviors through several Atomic Operations, such as selection, formation, and routing. We evaluate SASS through simulating static and dynamic tasks and comparing them with the state-of-the-art collision-aware task assignment method integrated into our framework.}, keywords = {behavior-trees, multi-robot systems}, pubstate = {published}, tppubtype = {conference} } Research in multi-robot and swarm systems has seen significant interest in cooperation of agents in complex and dynamic environments. To effectively adapt to unknown environments and maximize the utility of the group, robots need to cooperate, share information, and make a suitable plan according to the specific scenario. Inspired by Maslow’s hierarchy of human needs and systems theory, we introduce Robot’s Need Hierarchy and propose a new solution called Self-Adaptive Swarm System (SASS). It combines multi-robot perception, communication, planning, and execution with the cooperative management of conflicts through a distributed Negotiation-Agreement Mechanism that prioritizes robot’s needs. We also decompose the complex tasks into simple executable behaviors through several Atomic Operations, such as selection, formation, and routing. We evaluate SASS through simulating static and dynamic tasks and comparing them with the state-of-the-art collision-aware task assignment method integrated into our framework. |
 | Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots Conference The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall , 2020. Abstract | Links | BibTeX | Tags: localization, networking, robotics @conference{Parashar2020, title = {Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots}, author = {Ravi Parashar and Ramviyas Parasuraman}, url = {http://hero.uga.edu/wp-content/uploads/2020/07/ArXiv_VTCW_2020_Parashar.pdf}, year = {2020}, date = {2020-10-05}, booktitle = {The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall }, abstract = {Localization of autonomous vehicles in unknown and unstructured GPS-denied environments is still a relevant and major research challenge in the field of Robotics. Applications of such research can be found in search and rescue missions and connected vehicles, where multiple robots need an efficient solution for simultaneous localization through multi-sensor integration so that they can effectively cooperate and coordinate tasks amongst themselves. In this paper, we propose a novel method for estimating the position of a WiFi access point in relation to a moving robot. Specifically, we exploit the integration of two sensors: Direction-of-arrival (DOA) of WiFi signals and the robot's odometry and combine them with Gaussian probabilistic sampling in a Particle Filter framework. We evaluate the proposed method in terms of accuracy and computational efficiency through extensive trials on datasets gathered from real-world measurements with mobile robots and compared our method against standard approaches. The results demonstrate superior localization accuracy (up to 3x improvement) and capability for most practical applications. }, keywords = {localization, networking, robotics}, pubstate = {published}, tppubtype = {conference} } Localization of autonomous vehicles in unknown and unstructured GPS-denied environments is still a relevant and major research challenge in the field of Robotics. Applications of such research can be found in search and rescue missions and connected vehicles, where multiple robots need an efficient solution for simultaneous localization through multi-sensor integration so that they can effectively cooperate and coordinate tasks amongst themselves. In this paper, we propose a novel method for estimating the position of a WiFi access point in relation to a moving robot. Specifically, we exploit the integration of two sensors: Direction-of-arrival (DOA) of WiFi signals and the robot's odometry and combine them with Gaussian probabilistic sampling in a Particle Filter framework. We evaluate the proposed method in terms of accuracy and computational efficiency through extensive trials on datasets gathered from real-world measurements with mobile robots and compared our method against standard approaches. The results demonstrate superior localization accuracy (up to 3x improvement) and capability for most practical applications. |
Publications
2025 |
|
| IKT-BT: Indirect Knowledge Transfer Behavior Tree Framework for Multirobot Systems Through Communication Eavesdropping Journal Article IEEE Transactions on Cybernetics, 2025. |
| Online Adaptive Anomaly Detection in Networked Electrical Machines by Adaptive Enveloped Singular Spectrum Transformation Journal Article IEEE Internet of Things Journal, 12 (6), pp. 6457-646, 2025. |
| Brief Announcement: Anonymous Distributed Localisation via Spatial Population Protocols Conference 4th Symposium on Algorithmic Foundations of Dynamic Networks (SAND 2025), 2025. |
| GMF: Gravitational Mass-Force Framework for Parametric Multi-Level Coordination In Multi-Robot and Swarm Robotic Systems Conference Forthcoming 2025 IEEE International Conference on Robotics and Automation (ICRA), Forthcoming. |
2024 |
|
| Bayesian Strategy Networks Based Soft Actor-Critic Learning Journal Article ACM Transactions on Intelligent Systems and Technology, 15 (3), pp. 1–24, 2024. |
| Communication-Efficient Multi-Robot Exploration Using Coverage-biased Distributed Q-Learning Journal Article IEEE Robotics and Automation Letters, 9 (3), pp. 2622 - 2629, 2024. |
| Instantaneous Wireless Robotic Node Localization Using Collaborative Direction of Arrival Journal Article IEEE Internet of Things Journal, 11 (2), pp. 2783 - 2795, 2024. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Conference Forthcoming The 17th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2024, Forthcoming, (In Press). |
| 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage Conference 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), 2024. |
| Route Planning for Electric Vehicles with Charging Constraints Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. |
| Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles Conference 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), 2024. |
| PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations Conference The 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024, 2024. |
| Map2Schedule: An End-to-End Link Scheduling Method for Urban V2V Communications Conference 2024 IEEE International Conference on Communications (ICC), 2024, (Accepted for Presentation at ICC 2024). |
| Bayesian Soft Actor-Critic: A Directed Acyclic Strategy Graph Based Deep Reinforcement Learning Conference 2024 ACM/SIGAPP Symposium on Applied Computing (SAC) , IRMAS Track 2024. |
2023 |
|
| Exploration–Exploitation Tradeoff in the Adaptive Information Sampling of Unknown Spatial Fields with Mobile Robots Journal Article Sensors, 23 (23), 2023. |
| On the Intersection of Computational Geometry Algorithms with Mobile Robot Path Planning Journal Article Algorithms, 16 (11), pp. 498, 2023. |
| KT-BT: A Framework for Knowledge Transfer Through Behavior Trees in Multi-Robot Systems Journal Article IEEE Transactions on Robotics, 30 (5), pp. 4114 - 4130, 2023. |
| Rapid prediction of network quality in mobile robots Journal Article Ad Hoc Networks, 138 , 2023, ISSN: 1570-8705. |
| Utility AI for Dynamic Task Offloading in the Multi-Edge Infrastructure Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| Consensus-based Resource Scheduling for Collaborative Multi-Robot Tasks Conference 2023 Sixth IEEE International Conference on Robotic Computing (IRC), 2023. |
| SEAL: Simultaneous Exploration and Localization in Multi-Robot Systems Conference 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE 2023. |
| Systems Design Concepts mimicking Bio-inspired Self-assembly Conference 9th International Conference on Research Into Design (ICoRD), Springer, 2023. |
| Communication-Efficient Reinforcement Learning in Swarm Robotic Networks for Maze Exploration Conference IEEE INFOCOM 2023 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), 2023. |
| The 38th ACM/SIGAPP Symposium On Applied Computing, IRMAS 2023, (Oral Presentation. Acceptance Rate: <25%). |
| Mobile Robot Control and Autonomy Through Collaborative Twin Conference 2023 IEEE PerCom - International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, 2023. |
| A Strategy-Oriented Bayesian Soft Actor-Critic Model Conference Procedia Computer Science, 220 , ANT 2023 Elsevier, 2023. |
| HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support Conference 2023 IEEE/SICE International Symposium on System Integrations (SII 2023) , IEEE, 2023. |
| Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System Workshop IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2023, 2023, (Presented as Poster Paper). |
| CQLite: Coverage-biased Q-Learning for Communication-Efficient Multi-Robot Exploration Workshop ICRA 2023 Workshop: Communication Challenges in Multi-Robot Systems: Perception, Coordination, and Learning, 2023. |
2022 |
|
| Analog Twin Framework for Human and AI Supervisory Control and Teleoperation of Robots Journal Article IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, ISSN: 2168-2232. |
| DGORL: Distributed Graph Optimization based Relative Localization of Multi-Robot Systems Conference The 16th International Symposium on Distributed Autonomous Robotic Systems (DARS) 2022, 2022, (Nominated for the Best Student Paper Award). |
| 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), IEEE, 2022. |
| Multi-Robot Synergistic Localization in Dynamic Environments Conference ISR Europe 2022; 54th International Symposium on Robotics, 2022. |
| Game-theoretic Utility Tree for Multi-Robot Cooperative Pursuit Strategy Conference ISR Europe 2022; 54th International Symposium on Robotics , 2022. |
| The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| Message Expiration-Based Distributed Multi-Robot Task Management Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| Energy-Aware Multi-Robot Task Allocation in Persistent Tasks Conference The 5th International Symposium on Swarm Behavior and Bio-Inspired Robotics (SWARM 2022), 2022. |
| A Game-theoretic Utility Network for Multi-Agent Decisions in Adversarial Environments Workshop IROS 2022 Workshop on Decision Making in Multi-Agent Systems, 2022. |
| Sharing Autonomy of Exploration and Exploitation via Control Interface Workshop ICRA 2022 Workshop on Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust, 2022. |
| Collaborative Control of Mobile Robots Using Analog Twin Framework Workshop ICRA 2022 Workshop on Intelligent Control Methods and Machine Learning Algorithms for Human-Robot Interaction and Assistive Robotics, 2022. |
| On Physical Compatibility of Robots in Human-Robot Collaboration Settings Workshop ICRA 2022 WORKSHOP ON COLLABORATIVE ROBOTS AND THE WORK OF THE FUTURE, 2022. |
2021 |
|
| 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), IEEE IEEE, 2021. |
2020 |
|
| Multi-Point Rendezvous in Multi-Robot Systems Journal Article IEEE Transactions on Cybernetics, 50 (1), pp. 310-323, 2020, ISBN: 2168-2275. |
| Needs-driven Heterogeneous Multi-Robot Cooperation in Rescue Missions Conference 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. |
| 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR 2020), 2020. |
| Material Mapping in Unknown Environments using Tapping Sound Conference 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), 2020. |
| Hierarchical Needs Based Self-Adaptive Framework For Cooperative Multi-Robot System Conference IEEE SMC 2020 INTERNATIONAL CONFERENCE ON SYSTEMS, MAN, AND CYBERNETICS, 2020. |
| Particle Filter Based Localization of Access Points Using Direction of Arrival on Mobile Robots Conference The 2020 IEEE 92nd Vehicular Technology Conference: VTC2020-Fall , 2020. |